 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Reachability Tree-Based Algorithm for Robot Task and Motion Planning
Paper and Code
Mar 07, 2023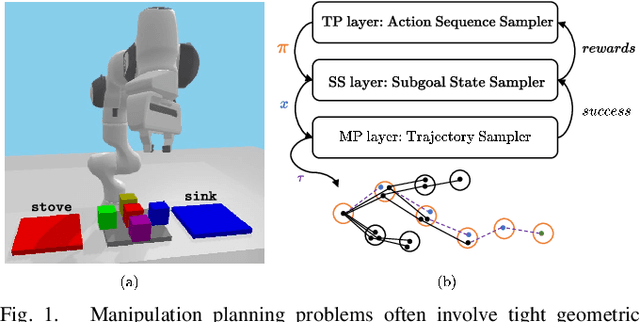
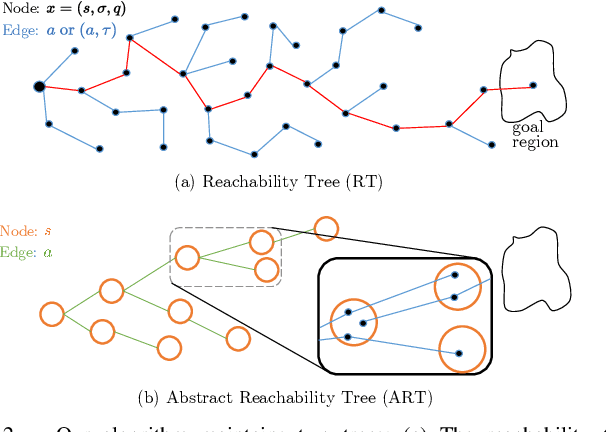
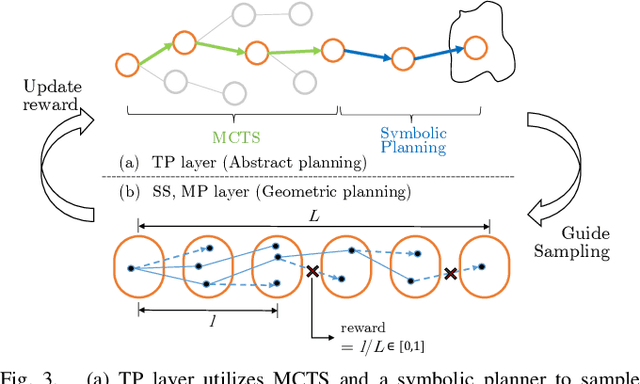
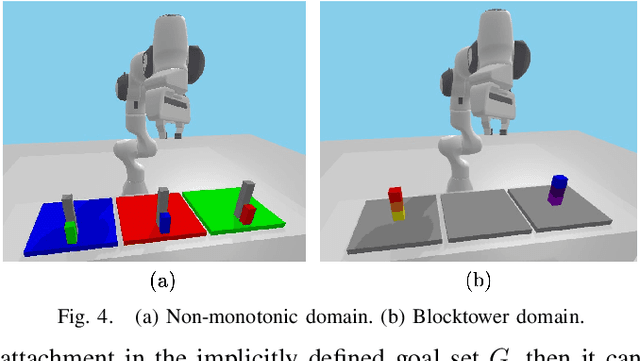
This paper presents a novel algorithm for robot task and motion planning (TAMP) problems by utilizing a reachability tree. While tree-based algorithms are known for their speed and simplicity in motion planning (MP), they are not well-suited for TAMP problems that involve both abstracted and geometrical state variables. To address this challenge, we propose a hierarchical sampling strategy, which first generates an abstracted task plan using Monte Carlo tree search (MCTS) and then fills in the details with a geometrically feasible motion trajectory. Moreover, we show that the performance of the proposed method can be significantly enhanced by selecting an appropriate reward for MCTS and by using a pre-generated goal state that is guaranteed to be geometrically feasible. A comparative study using TAMP benchmark problems demonstrates the effectiveness of the proposed approach.