 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHumanoid Robot Running Through Random Stepping Stones and Jumping Over Obstacles: Step Adaptation Using Spring-Mass Trajectories
Dec 15, 2025This study proposes a step adaptation framework for running through spring-mass trajectories and deadbeat control gain libraries. It includes four main parts: (1) Automatic spring-mass trajectory library generation; (2) Deadbeat control gain library generation through an actively controlled template model that resembles the whole-body dynamics well; (3) Trajectory selection policy development for step adaptation; (4) Mapping spring-mass trajectories to a humanoid model through a whole-body control (WBC) framework also accounting for closed-kinematic chain systems, self collisions, and reactive limb swinging. We show the inclusiveness and the robustness of the proposed framework through various challenging and agile behaviors such as running through randomly generated stepping stones, jumping over random obstacles, performing slalom motions, changing the running direction suddenly with a random leg, and rejecting significant disturbances and uncertainties through the MuJoCo physics simulator. We also perform additional simulations under a comprehensive set of uncertainties and noise to better justify the proposed method's robustness to real-world challenges, including signal noise, imprecision, modeling errors, and delays. All the aforementioned behaviors are performed with a single library and the same set of WBC control parameters without additional tuning. The spring-mass and the deadbeat control gain library are automatically computed in 4.5 seconds in total for 315 different trajectories.
Realtime Limb Trajectory Optimization for Humanoid Running Through Centroidal Angular Momentum Dynamics
Jan 30, 2025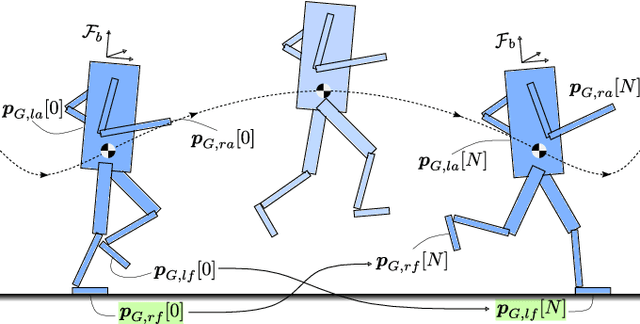
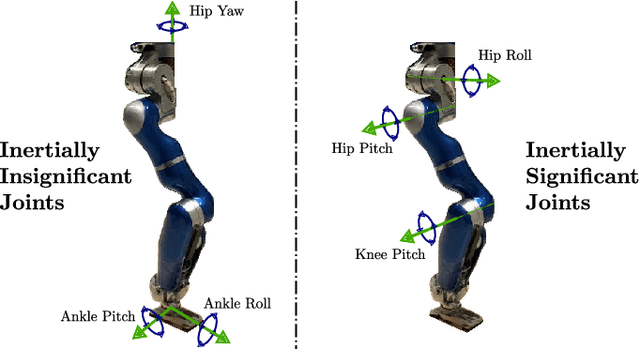
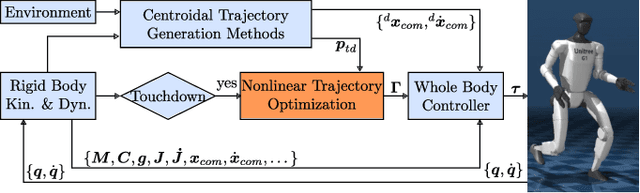
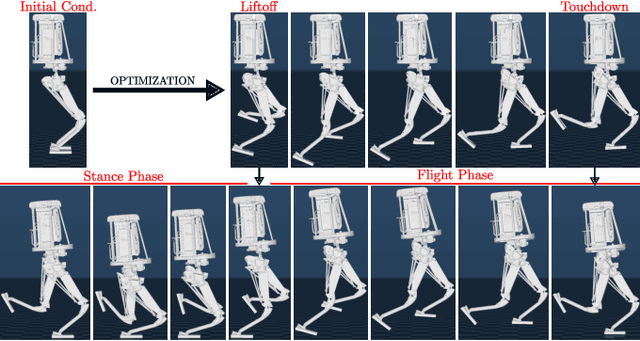
One of the essential aspects of humanoid robot running is determining the limb-swinging trajectories. During the flight phases, where the ground reaction forces are not available for regulation, the limb swinging trajectories are significant for the stability of the next stance phase. Due to the conservation of angular momentum, improper leg and arm swinging results in highly tilted and unsustainable body configurations at the next stance phase landing. In such cases, the robotic system fails to maintain locomotion independent of the stability of the center of mass trajectories. This problem is more apparent for fast and high flight time trajectories. This paper proposes a real-time nonlinear limb trajectory optimization problem for humanoid running. The optimization problem is tested on two different humanoid robot models, and the generated trajectories are verified using a running algorithm for both robots in a simulation environment.
Sensitivity of Legged Balance Control to Uncertainties and Sampling Period
Jul 03, 2019



We propose to quantify the effect of sensor and actuator uncertainties on the control of the center of mass and center of pressure in legged robots, since this is central for maintaining their balance with a limited support polygon. Our approach is based on robust control theory, considering uncertainties that can take any value between specified bounds. This provides a principled approach to deciding optimal feedback gains. Surprisingly, our main observation is that the sampling period can be as long as 200 ms with literally no impact on maximum tracking error and, as a result, on the guarantee that balance can be maintained safely. Our findings are validated in simulations and experiments with the torque-controlled humanoid robot Toro developed at DLR. The proposed mathematical derivations and results apply nevertheless equally to biped and quadruped robots.