 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Accuracy and Computational Effort in QP-based Robot Control
Jul 23, 2024
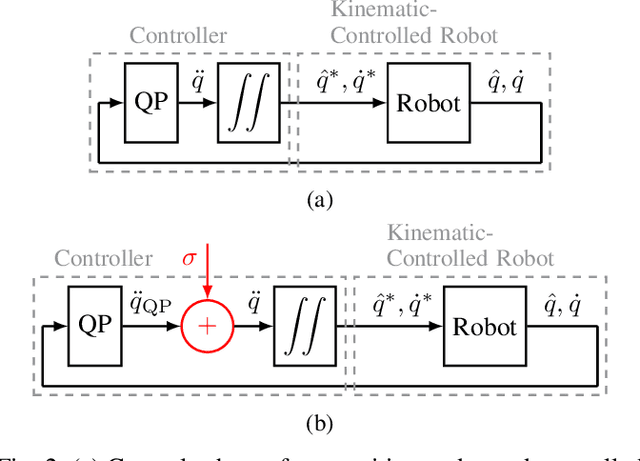

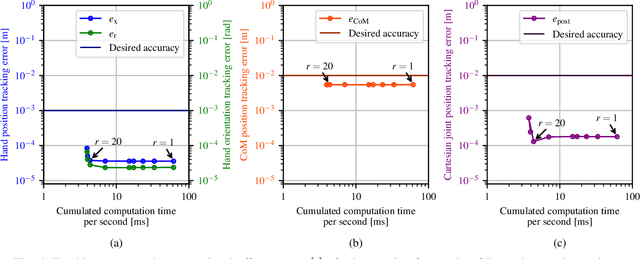
Quadratic Programs (QPs) have become a mature technology for the control of robots of all kinds, including humanoid robots. One aspect has been largely overlooked, however, which is the accuracy with which these QPs should be solved. Typical QP solvers aim at providing solutions accurate up to floating point precision ($\approx10^{-8}$). Considering physical quantities expressed in SI or similar units (meters, radians, etc.), such precision seems completely unrelated to both task requirements and hardware capacity. Typically, humanoid robots never achieve, nor are capable of achieving sub-millimeter precision in manipulation tasks. With this observation in mind, our objectives in this paper are two-fold: first examine how the QP solution accuracy impacts the resulting robot motion accuracy, then evaluate how a reduced solution accuracy requirement can be leveraged to reduce the corresponding computational effort. Numerical experiments with a dynamic simulation of a HRP-4 robot indicate that computational effort can be divided by more than 20 while maintaining the desired motion accuracy.
Sensitivity of Legged Balance Control to Uncertainties and Sampling Period
Jul 03, 2019



We propose to quantify the effect of sensor and actuator uncertainties on the control of the center of mass and center of pressure in legged robots, since this is central for maintaining their balance with a limited support polygon. Our approach is based on robust control theory, considering uncertainties that can take any value between specified bounds. This provides a principled approach to deciding optimal feedback gains. Surprisingly, our main observation is that the sampling period can be as long as 200 ms with literally no impact on maximum tracking error and, as a result, on the guarantee that balance can be maintained safely. Our findings are validated in simulations and experiments with the torque-controlled humanoid robot Toro developed at DLR. The proposed mathematical derivations and results apply nevertheless equally to biped and quadruped robots.