 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEigenMPC: An Eigenmanifold-Inspired Model-Predictive Control Framework for Exciting Efficient Oscillations in Mechanical Systems
Mar 03, 2023



This paper proposes a Nonlinear Model-Predictive Control (NMPC) method capable of finding and converging to energy-efficient regular oscillations, which require no control action to be sustained. The approach builds up on the recently developed Eigenmanifold theory, which defines the sets of line-shaped oscillations of a robot as an invariant two-dimensional submanifold of its state space. By defining the control problem as a nonlinear program (NLP), the controller is able to deal with constraints in the state and control variables and be energy-efficient not only in its final trajectory but also during the convergence phase. An initial implementation of this approach is proposed, analyzed, and tested in simulation.
A Nonlinear Observer for Free-Floating Target Motion using only Pose Measurements
Mar 18, 2019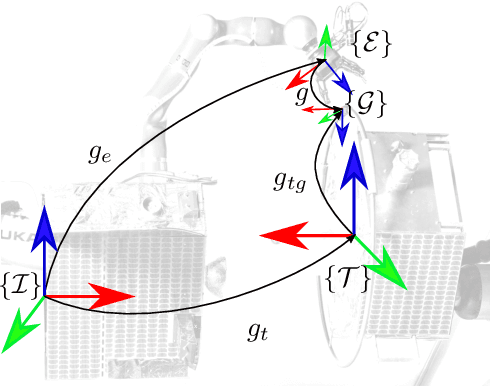

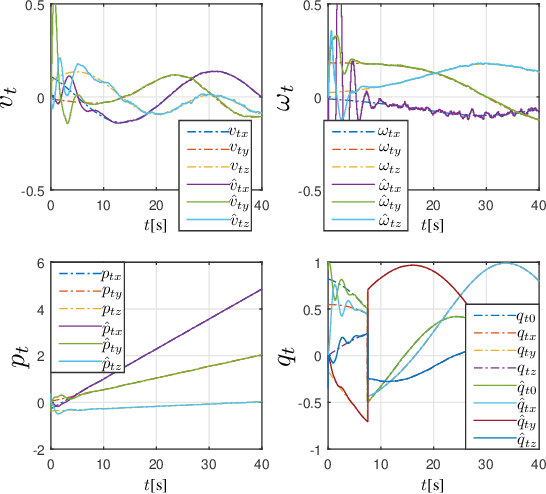
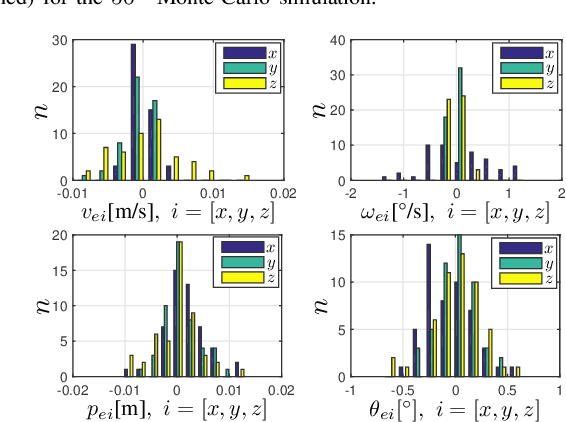
In this paper, we design a nonlinear observer to estimate the inertial pose and the velocity of a free-floating non-cooperative satellite (Target) using only relative pose measurements. In the context of control design for orbital robotic capture of such a non-cooperative Target, due to lack of navigational aids, only a relative pose estimate may be obtained from slow-sampled and noisy exteroceptive sensors. The velocity, however, cannot be measured directly. To address this problem, we develop a model-based observer which acts as an internal model for Target kinematics/dynamics and therefore, may act as a predictor during periods of no measurement. To this end, firstly, we formalize the estimation problem on the SE(3) Lie group with different state and measurement spaces. Secondly, we develop the kinematics and dynamics observer such that the overall observer error dynamics possesses a stability property. Finally, the proposed observer is validated through robust Monte-Carlo simulations and experiments on a robotic facility.