 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSPIRIT: Perceptive Shared Autonomy for Robust Robotic Manipulation under Deep Learning Uncertainty
Mar 05, 2026Deep learning (DL) has enabled impressive advances in robotic perception, yet its limited robustness and lack of interpretability hinder reliable deployment in safety critical applications. We propose a concept termed perceptive shared autonomy, in which uncertainty estimates from DL based perception are used to regulate the level of autonomy. Specifically, when the robot's perception is confident, semi-autonomous manipulation is enabled to improve performance; when uncertainty increases, control transitions to haptic teleoperation for maintaining robustness. In this way, high-performing but uninterpretable DL methods can be integrated safely into robotic systems. A key technical enabler is an uncertainty aware DL based point cloud registration approach based on the so called Neural Tangent Kernels (NTK). We evaluate perceptive shared autonomy on challenging aerial manipulation tasks through a user study of 15 participants and realization of mock-up industrial scenarios, demonstrating reliable robotic manipulation despite failures in DL based perception. The resulting system, named SPIRIT, improves both manipulation performance and system reliability. SPIRIT was selected as a finalist of a major industrial innovation award.
Care3D: An Active 3D Object Detection Dataset of Real Robotic-Care Environments
Oct 09, 2023



As labor shortage increases in the health sector, the demand for assistive robotics grows. However, the needed test data to develop those robots is scarce, especially for the application of active 3D object detection, where no real data exists at all. This short paper counters this by introducing such an annotated dataset of real environments. The captured environments represent areas which are already in use in the field of robotic health care research. We further provide ground truth data within one room, for assessing SLAM algorithms running directly on a health care robot.
EigenMPC: An Eigenmanifold-Inspired Model-Predictive Control Framework for Exciting Efficient Oscillations in Mechanical Systems
Mar 03, 2023



This paper proposes a Nonlinear Model-Predictive Control (NMPC) method capable of finding and converging to energy-efficient regular oscillations, which require no control action to be sustained. The approach builds up on the recently developed Eigenmanifold theory, which defines the sets of line-shaped oscillations of a robot as an invariant two-dimensional submanifold of its state space. By defining the control problem as a nonlinear program (NLP), the controller is able to deal with constraints in the state and control variables and be energy-efficient not only in its final trajectory but also during the convergence phase. An initial implementation of this approach is proposed, analyzed, and tested in simulation.
Model-free Friction Observers for Flexible Joint Robots with Torque Measurements
Jul 01, 2019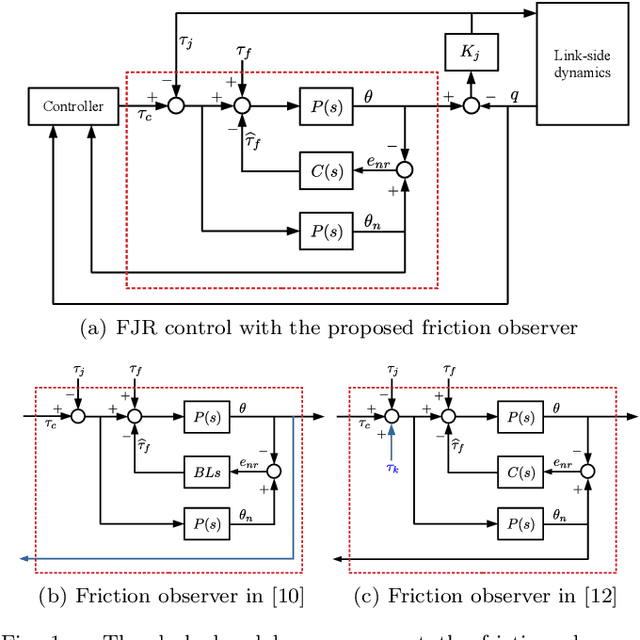
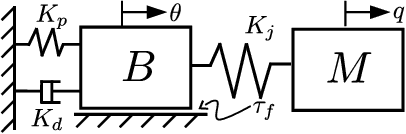

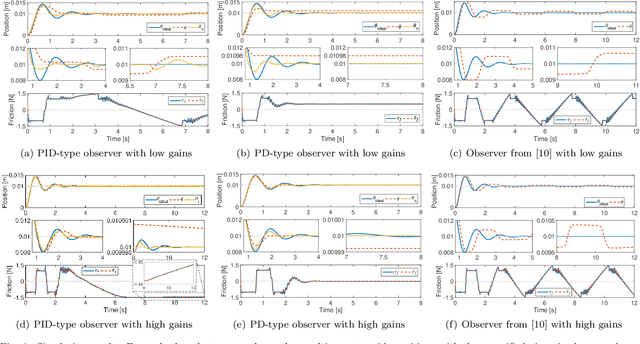
This paper tackles a friction compensation problem without using a friction model. The unique feature of the proposed friction observer is that the nominal motor-side signal is fed back into the controller instead of the measured signal. By doing so, asymptotic stability and passivity of the controller are maintained. Another advantage of the proposed observer is that it provides a clear understanding for the stiction compensation which is hard to be captured in model-free approaches. This allows to design observers that do not overcompensate for the stiction. The proposed scheme is validated through simulations and experiments.
A dataset of continuous affect annotations and physiological signals for emotion analysis
Dec 06, 2018
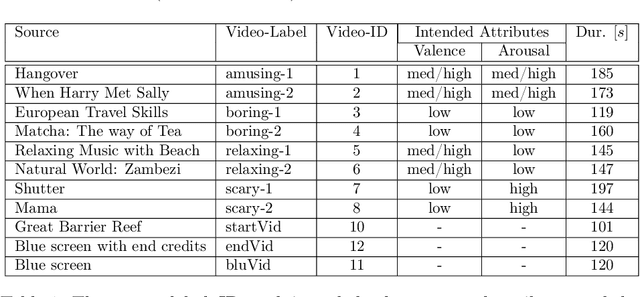
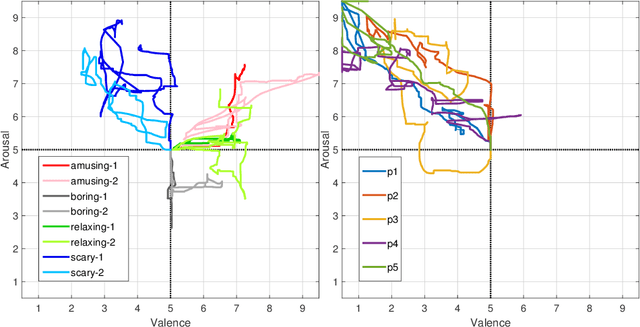
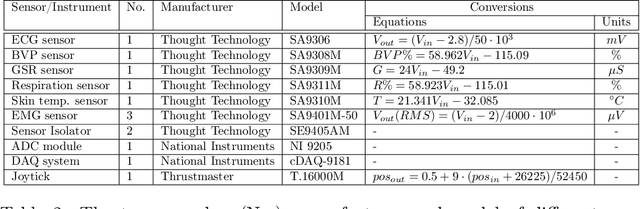
From a computational viewpoint, emotions continue to be intriguingly hard to understand. In research, direct, real-time inspection in realistic settings is not possible. Discrete, indirect, post-hoc recordings are therefore the norm. As a result, proper emotion assessment remains a problematic issue. The Continuously Annotated Signals of Emotion (CASE) dataset provides a solution as it focusses on real-time continuous annotation of emotions, as experienced by the participants, while watching various videos. For this purpose, a novel, intuitive joystick-based annotation interface was developed, that allowed for simultaneous reporting of valence and arousal, that are instead often annotated independently. In parallel, eight high quality, synchronized physiological recordings (1000 Hz, 16-bit ADC) were made of ECG, BVP, EMG (3x), GSR (or EDA), respiration and skin temperature. The dataset consists of the physiological and annotation data from 30 participants, 15 male and 15 female, who watched several validated video-stimuli. The validity of the emotion induction, as exemplified by the annotation and physiological data, is also presented.