Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-free Friction Observers for Flexible Joint Robots with Torque Measurements
Jul 01, 2019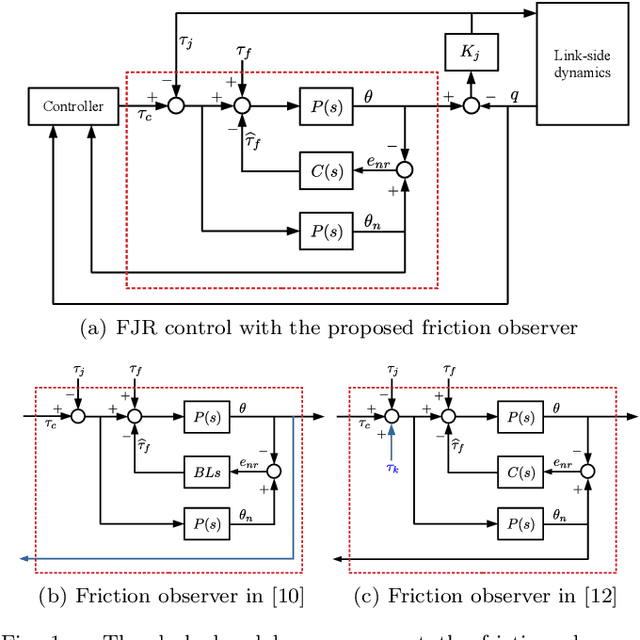

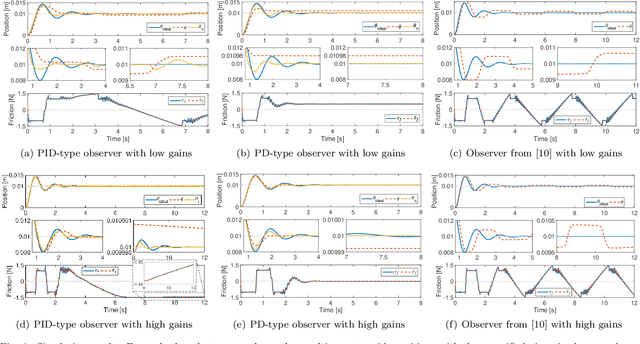
This paper tackles a friction compensation problem without using a friction model. The unique feature of the proposed friction observer is that the nominal motor-side signal is fed back into the controller instead of the measured signal. By doing so, asymptotic stability and passivity of the controller are maintained. Another advantage of the proposed observer is that it provides a clear understanding for the stiction compensation which is hard to be captured in model-free approaches. This allows to design observers that do not overcompensate for the stiction. The proposed scheme is validated through simulations and experiments.
* IEEE Transactions on Robotics
Via