 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommitDistill: A Lightweight Knowledge-Centric Memory Layer for Software Repositories
May 18, 2026Software repositories accumulate large amounts of unstructured knowledge in commit messages, pull-request discussions, and issue threads, but developers and AI coding assistants rarely reuse this history effectively. Recent work on typed-memory architectures for LLM agents (MemGPT, generative agents, and the PlugMem module of Yang et al.) argues that agent memory should be distilled, typed knowledge rather than raw interaction text. We adapt that stance to a software repository's own git history under a constrained regime: deterministic, dependency-free, local-only, no embeddings. We present CommitDistill, an open-source Python prototype that mines a local git history into typed knowledge units (Facts, Skills, Patterns) using deterministic regex and surfaces them through a TF-IDF retriever with a calibrated silence threshold (theta = 2.5) that abstains on out-of-distribution queries. The artefact is a trust-instrumented memory substrate: deterministic, no external service, inspectable plain-JSON store, tunable abstention. A case study on five public repositories spanning Python, JavaScript, C, and Java (25,000 commits, 1,167 extracted units) reports useful-precision 0.525 at Cohen's kappa = 0.633 on 40 dual-annotated Python units. The decisive finding is budget-constrained retrieval: at a 256-character per-query budget, CommitDistill reaches 0.750 hit-rate on a 12-query benchmark against BM25's 0.333 and git log --grep's 0.083. On a four-arm paired LLM-as-judge evaluation (n=200 time-travel bug-fixes, two judges) covering control, CommitDistill, a body-budget-matched CD-Hybrid, and BM25, no condition produces a statistically detectable lift over control on the headline mean and CD-Hybrid is indistinguishable from BM25 head-to-head. Extraction over 10,000 commits completes in under 4 seconds on a laptop. Source, annotations, baselines, and a reproducibility script accompany this paper.
SPIRIT: Perceptive Shared Autonomy for Robust Robotic Manipulation under Deep Learning Uncertainty
Mar 05, 2026Deep learning (DL) has enabled impressive advances in robotic perception, yet its limited robustness and lack of interpretability hinder reliable deployment in safety critical applications. We propose a concept termed perceptive shared autonomy, in which uncertainty estimates from DL based perception are used to regulate the level of autonomy. Specifically, when the robot's perception is confident, semi-autonomous manipulation is enabled to improve performance; when uncertainty increases, control transitions to haptic teleoperation for maintaining robustness. In this way, high-performing but uninterpretable DL methods can be integrated safely into robotic systems. A key technical enabler is an uncertainty aware DL based point cloud registration approach based on the so called Neural Tangent Kernels (NTK). We evaluate perceptive shared autonomy on challenging aerial manipulation tasks through a user study of 15 participants and realization of mock-up industrial scenarios, demonstrating reliable robotic manipulation despite failures in DL based perception. The resulting system, named SPIRIT, improves both manipulation performance and system reliability. SPIRIT was selected as a finalist of a major industrial innovation award.
Whole-Body Bilateral Teleoperation of a Redundant Aerial Manipulator
Feb 11, 2020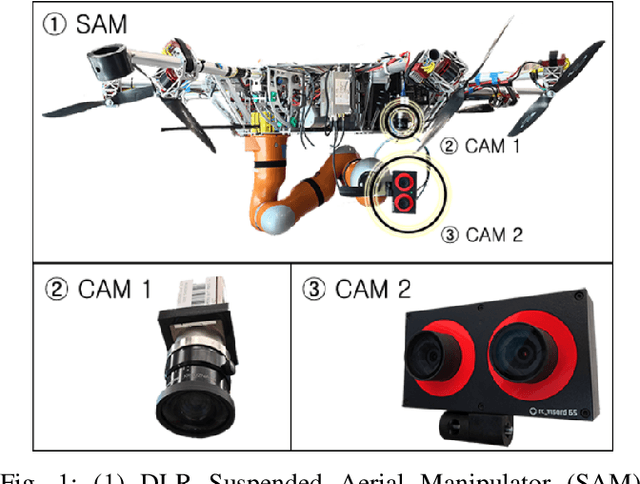
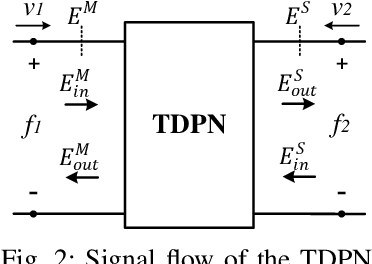
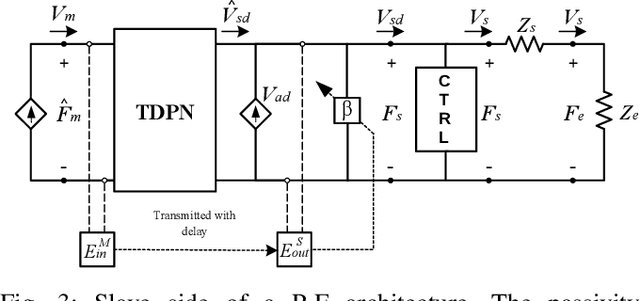
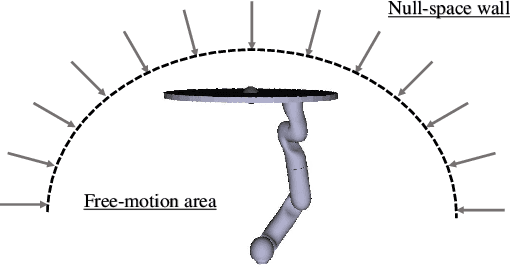
Attaching a robotic manipulator to a flying base allows for significant improvements in the reachability and versatility of manipulation tasks. In order to explore such systems while taking advantage of human capabilities in terms of perception and cognition, bilateral teleoperation arises as a reasonable solution. However, since most telemanipulation tasks require visual feedback in addition to the haptic one, real-time (task-dependent) positioning of a video camera, which is usually attached to the flying base, becomes an additional objective to be fulfilled. Since the flying base is part of the kinematic structure of the robot, if proper care is not taken, moving the video camera could undesirably disturb the end-effector motion. For that reason, the necessity of controlling the base position in the null space of the manipulation task arises. In order to provide the operator with meaningful information about the limits of the allowed motions in the null space, this paper presents a novel haptic concept called Null-Space Wall. In addition, a framework to allow stable bilateral teleoperation of both tasks is presented. Numerical simulation data confirm that the proposed framework is able to keep the system passive while allowing the operator to perform time-delayed telemanipulation and command the base to a task-dependent optimal pose.
Smoother Position-Drift Compensation for Time Domain Passivity Approach based Teleoperation
Feb 06, 2020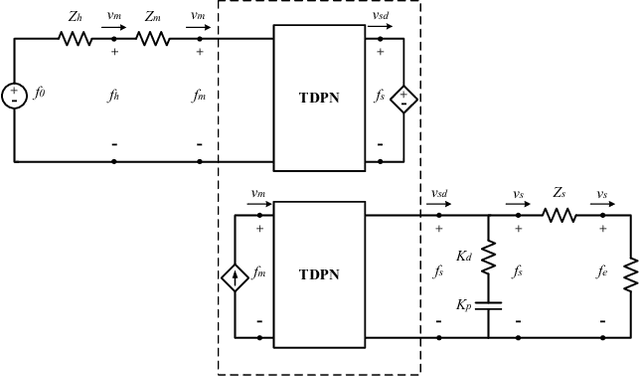
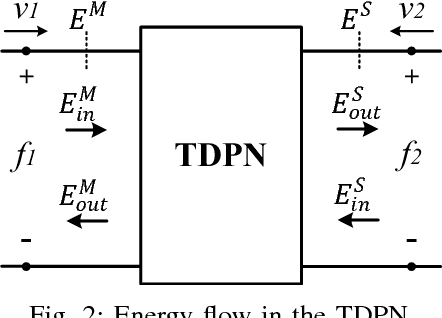
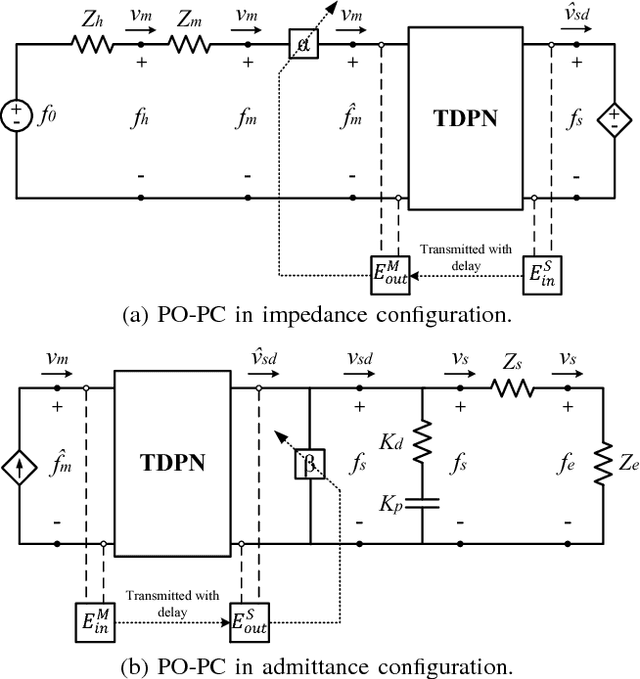
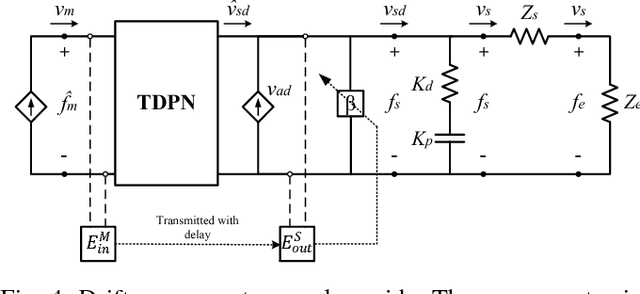
Despite being one of the most robust methods in bilateral teleoperation, Time Domain Passivity Approach (TDPA) presents the drawback of accumulating position drift between master and slave devices. The lack of position synchronization poses an obstacle to the performance of teleoperation and may prevent the successful accomplishment of such tasks. Several techniques have been developed in order to solve the position-drift problem in TDPA-based teleoperation. However, they either present poor transparency by over-conservatively constraining force feedback or add high impulse-like force signals that can be harmful to the hardware and to the human operator. We propose a new approach to compensate position drift in TDPA-based teleoperation in a smoother way, which keeps the forces within the normal range of the teleoperation task while preserving the level of transparency and the robust stability of energy-based TDPA. We also add a way of tuning the compensator to behave in accordance with the task being performed, whether it requires faster or smoother compensation. The feasibility and performance of the method were experimentally validated. Good position tracking and regular-amplitude forces are demonstrated with up to 500 ms round-trip constant and variable delays for hard-wall contacts.
Multi-DoF Time Domain Passivity Approach Based Drift Compensation for Telemanipulation
Oct 10, 2019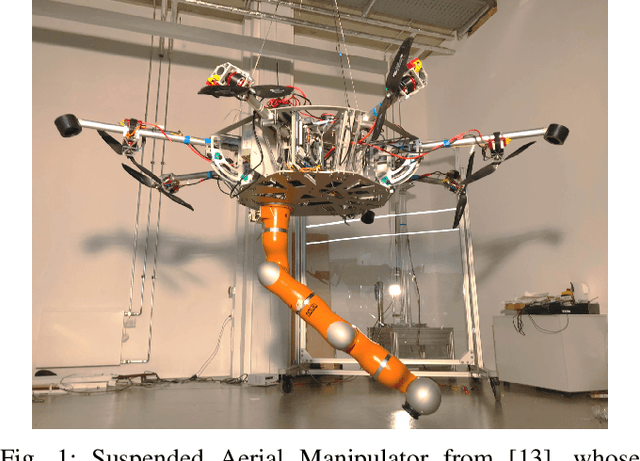
When, in addition to stability, position synchronization is also desired in bilateral teleoperation, Time Domain Passivity Approach (TDPA) alone might not be able to fulfill the desired objective. This is due to an undesired effect caused by admittance type passivity controllers, namely position drift. Previous works focused on developing TDPA-based drift compensation methods to solve this issue. It was shown that, in addition to reducing drift, one of the proposed methods was able to keep the force signals within their normal range, guaranteeing the safety of the task. However, no multi-DoF treatment of those approaches has been addressed. In that scope, this paper focuses on providing an extension of previous TDPA-based approaches to multi-DoF Cartesian-space teleoperation. An analysis of the convergence properties of the presented method is also provided. In addition, its applicability to multi-DoF devices is shown through hardware experiments and numerical simulation with round-trip time delays up to 700 ms.