 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePartial Feedback Linearization Control of a Cable-Suspended Multirotor Platform for Stabilization of an Attached Load
Oct 15, 2025In this work, we present a novel control approach based on partial feedback linearization (PFL) for the stabilization of a suspended aerial platform with an attached load. Such systems are envisioned for various applications in construction sites involving cranes, such as the holding and transportation of heavy objects. Our proposed control approach considers the underactuation of the whole system while utilizing its coupled dynamics for stabilization. We demonstrate using numerical stability analysis that these coupled terms are crucial for the stabilization of the complete system. We also carried out robustness analysis of the proposed approach in the presence of external wind disturbances, sensor noise, and uncertainties in system dynamics. As our envisioned target application involves cranes in outdoor construction sites, our control approaches rely on only onboard sensors, thus making it suitable for such applications. We carried out extensive simulation studies and experimental tests to validate our proposed control approach.
Learning Swing-up Maneuvers for a Suspended Aerial Manipulation Platform in a Hierarchical Control Framework
Jun 16, 2025In this work, we present a novel approach to augment a model-based control method with a reinforcement learning (RL) agent and demonstrate a swing-up maneuver with a suspended aerial manipulation platform. These platforms are targeted towards a wide range of applications on construction sites involving cranes, with swing-up maneuvers allowing it to perch at a given location, inaccessible with purely the thrust force of the platform. Our proposed approach is based on a hierarchical control framework, which allows different tasks to be executed according to their assigned priorities. An RL agent is then subsequently utilized to adjust the reference set-point of the lower-priority tasks to perform the swing-up maneuver, which is confined in the nullspace of the higher-priority tasks, such as maintaining a specific orientation and position of the end-effector. Our approach is validated using extensive numerical simulation studies.
Observer-based Controller Design for Oscillation Damping of a Novel Suspended Underactuated Aerial Platform
Jan 31, 2024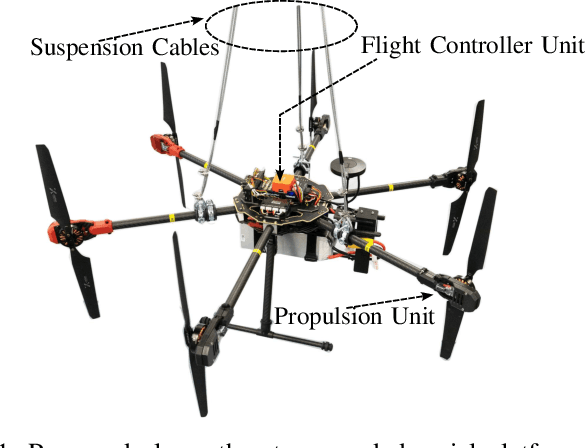
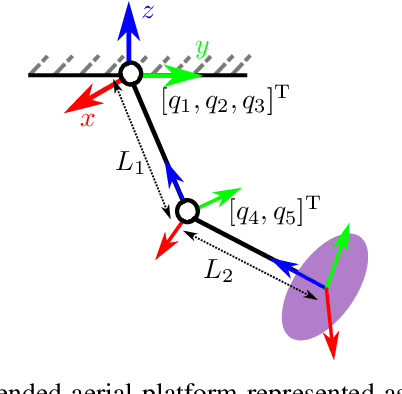
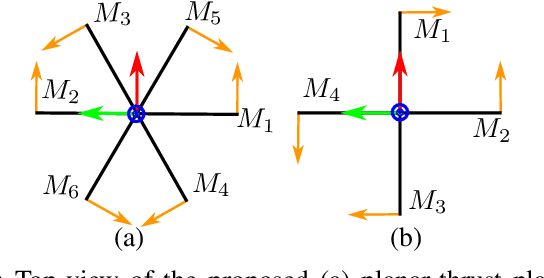
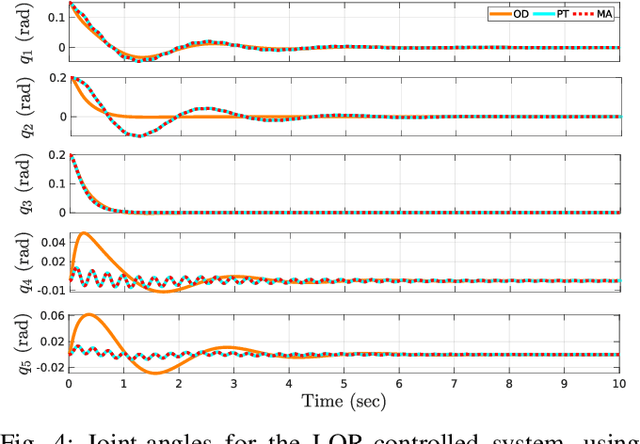
In this work, we present a novel actuation strategy for a suspended aerial platform. By utilizing an underactuation approach, we demonstrate the successful oscillation damping of the proposed platform, modeled as a spherical double pendulum. A state estimator is designed in order to obtain the deflection angles of the platform, which uses only onboard IMU measurements. The state estimator is an extended Kalman filter (EKF) with intermittent measurements obtained at different frequencies. An optimal state feedback controller and a PD+ controller are designed in order to dampen the oscillations of the platform in the joint space and task space respectively. The proposed underactuated platform is found to be more energy-efficient than an omnidirectional platform and requires fewer actuators. The effectiveness of our proposed system is validated using both simulations and experimental studies.