 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficiently Learning Robust Torque-based Locomotion Through Reinforcement with Model-Based Supervision
Jan 22, 2026We propose a control framework that integrates model-based bipedal locomotion with residual reinforcement learning (RL) to achieve robust and adaptive walking in the presence of real-world uncertainties. Our approach leverages a model-based controller, comprising a Divergent Component of Motion (DCM) trajectory planner and a whole-body controller, as a reliable base policy. To address the uncertainties of inaccurate dynamics modeling and sensor noise, we introduce a residual policy trained through RL with domain randomization. Crucially, we employ a model-based oracle policy, which has privileged access to ground-truth dynamics during training, to supervise the residual policy via a novel supervised loss. This supervision enables the policy to efficiently learn corrective behaviors that compensate for unmodeled effects without extensive reward shaping. Our method demonstrates improved robustness and generalization across a range of randomized conditions, offering a scalable solution for sim-to-real transfer in bipedal locomotion.
Enhancing Model-Based Step Adaptation for Push Recovery through Reinforcement Learning of Step Timing and Region
Nov 01, 2024



This paper introduces a new approach to enhance the robustness of humanoid walking under strong perturbations, such as substantial pushes. Effective recovery from external disturbances requires bipedal robots to dynamically adjust their stepping strategies, including footstep positions and timing. Unlike most advanced walking controllers that restrict footstep locations to a predefined convex region, substantially limiting recoverable disturbances, our method leverages reinforcement learning to dynamically adjust the permissible footstep region, expanding it to a larger, effectively non-convex area and allowing cross-over stepping, which is crucial for counteracting large lateral pushes. Additionally, our method adapts footstep timing in real time to further extend the range of recoverable disturbances. Based on these adjustments, feasible footstep positions and DCM trajectory are planned by solving a QP. Finally, we employ a DCM controller and an inverse dynamics whole-body control framework to ensure the robot effectively follows the trajectory.
I-CTRL: Imitation to Control Humanoid Robots Through Constrained Reinforcement Learning
May 14, 2024This paper addresses the critical need for refining robot motions that, despite achieving a high visual similarity through human-to-humanoid retargeting methods, fall short of practical execution in the physical realm. Existing techniques in the graphics community often prioritize visual fidelity over physics-based feasibility, posing a significant challenge for deploying bipedal systems in practical applications. Our research introduces a constrained reinforcement learning algorithm to produce physics-based high-quality motion imitation onto legged humanoid robots that enhance motion resemblance while successfully following the reference human trajectory. We name our framework: I-CTRL. By reformulating the motion imitation problem as a constrained refinement over non-physics-based retargeted motions, our framework excels in motion imitation with simple and unique rewards that generalize across four robots. Moreover, our framework can follow large-scale motion datasets with a unique RL agent. The proposed approach signifies a crucial step forward in advancing the control of bipedal robots, emphasizing the importance of aligning visual and physical realism for successful motion imitation.
Observer-based Controller Design for Oscillation Damping of a Novel Suspended Underactuated Aerial Platform
Jan 31, 2024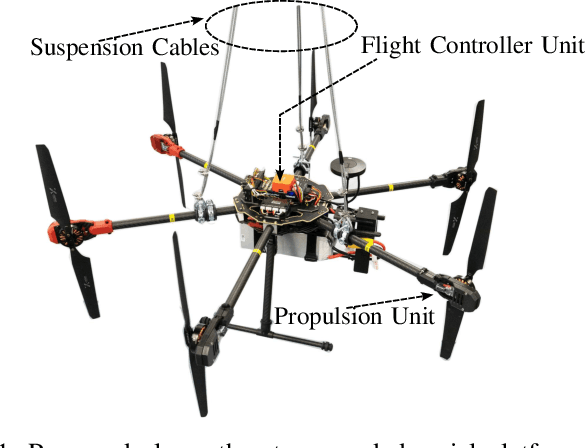
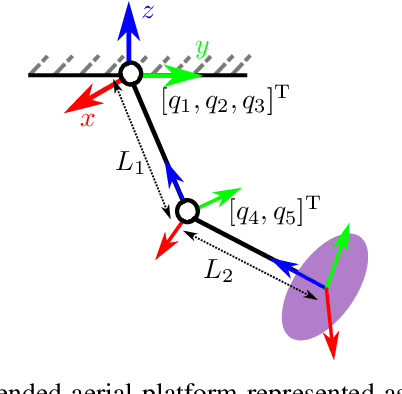
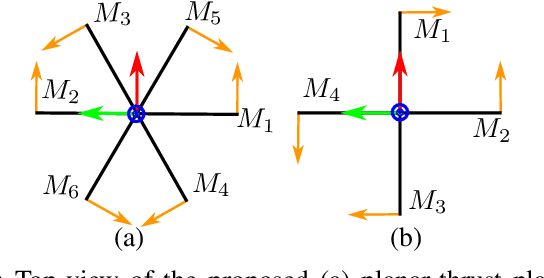
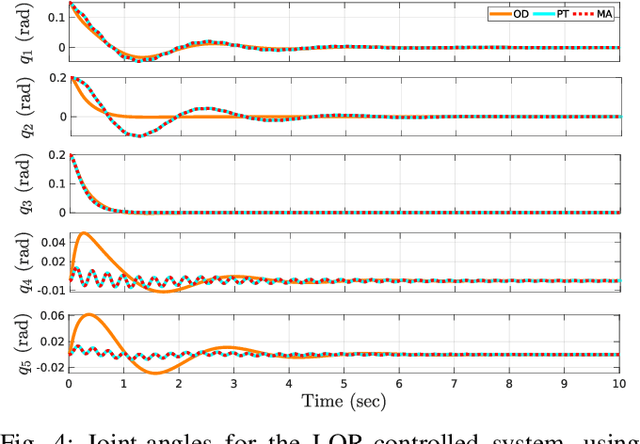
In this work, we present a novel actuation strategy for a suspended aerial platform. By utilizing an underactuation approach, we demonstrate the successful oscillation damping of the proposed platform, modeled as a spherical double pendulum. A state estimator is designed in order to obtain the deflection angles of the platform, which uses only onboard IMU measurements. The state estimator is an extended Kalman filter (EKF) with intermittent measurements obtained at different frequencies. An optimal state feedback controller and a PD+ controller are designed in order to dampen the oscillations of the platform in the joint space and task space respectively. The proposed underactuated platform is found to be more energy-efficient than an omnidirectional platform and requires fewer actuators. The effectiveness of our proposed system is validated using both simulations and experimental studies.