 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Wireless World Model for AI-Native 6G Networks
Mar 26, 2026Integrating AI into the physical layer is a cornerstone of 6G networks. However, current data-driven approaches struggle to generalize across dynamic environments because they lack an intrinsic understanding of electromagnetic wave propagation. We introduce the Wireless World Model (WWM), a multi-modal foundation framework predicting the spatiotemporal evolution of wireless channels by internalizing the causal relationship between 3D geometry and signal dynamics. Pre-trained on a massive ray-traced multi-modal dataset, WWM overcomes the data authenticity gap, further validated under real-world measurement data. Using a joint-embedding predictive architecture with a multi-modal mixture-of-experts Transformer, WWM fuses channel state information, 3D point clouds, and user trajectories into a unified representation. Across the five key downstream tasks supported by WWM, it achieves remarkable performance in seen environments, unseen generalization scenarios, and real-world measurements, consistently outperforming SOTA uni-modal foundation models and task-specific models. This paves the way for physics-aware 6G intelligence that adapts to the physical world.
Gassidy: Gaussian Splatting SLAM in Dynamic Environments
Nov 23, 20243D Gaussian Splatting (3DGS) allows flexible adjustments to scene representation, enabling continuous optimization of scene quality during dense visual simultaneous localization and mapping (SLAM) in static environments. However, 3DGS faces challenges in handling environmental disturbances from dynamic objects with irregular movement, leading to degradation in both camera tracking accuracy and map reconstruction quality. To address this challenge, we develop an RGB-D dense SLAM which is called Gaussian Splatting SLAM in Dynamic Environments (Gassidy). This approach calculates Gaussians to generate rendering loss flows for each environmental component based on a designed photometric-geometric loss function. To distinguish and filter environmental disturbances, we iteratively analyze rendering loss flows to detect features characterized by changes in loss values between dynamic objects and static components. This process ensures a clean environment for accurate scene reconstruction. Compared to state-of-the-art SLAM methods, experimental results on open datasets show that Gassidy improves camera tracking precision by up to 97.9% and enhances map quality by up to 6%.
Locomotion Generation for a Rat Robot based on Environmental Changes via Reinforcement Learning
Mar 19, 2024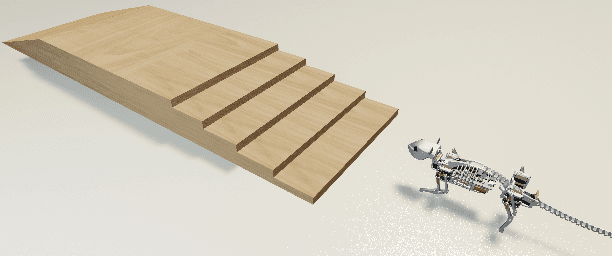
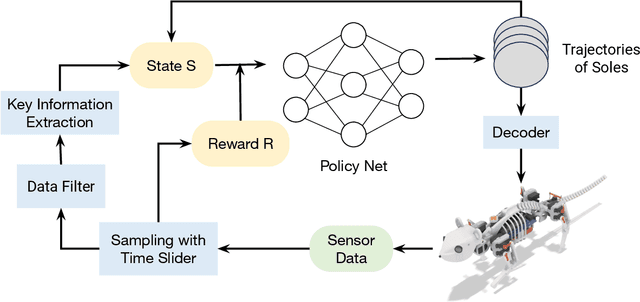
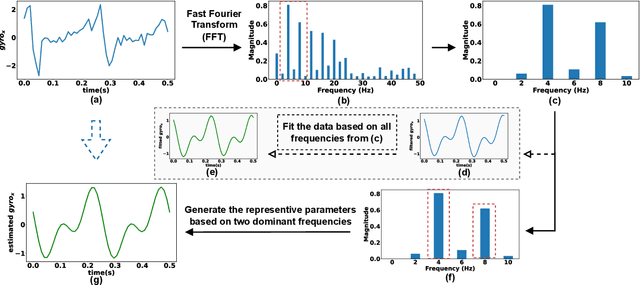
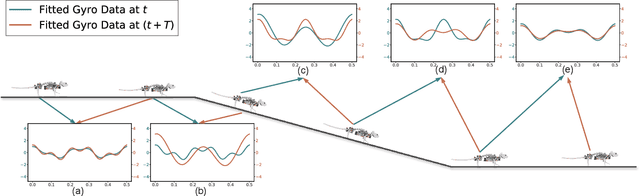
This research focuses on developing reinforcement learning approaches for the locomotion generation of small-size quadruped robots. The rat robot NeRmo is employed as the experimental platform. Due to the constrained volume, small-size quadruped robots typically possess fewer and weaker sensors, resulting in difficulty in accurately perceiving and responding to environmental changes. In this context, insufficient and imprecise feedback data from sensors makes it difficult to generate adaptive locomotion based on reinforcement learning. To overcome these challenges, this paper proposes a novel reinforcement learning approach that focuses on extracting effective perceptual information to enhance the environmental adaptability of small-size quadruped robots. According to the frequency of a robot's gait stride, key information of sensor data is analyzed utilizing sinusoidal functions derived from Fourier transform results. Additionally, a multifunctional reward mechanism is proposed to generate adaptive locomotion in different tasks. Extensive simulations are conducted to assess the effectiveness of the proposed reinforcement learning approach in generating rat robot locomotion in various environments. The experiment results illustrate the capability of the proposed approach to maintain stable locomotion of a rat robot across different terrains, including ramps, stairs, and spiral stairs.
Optimizing Dynamic Balance in a Rat Robot via the Lateral Flexion of a Soft Actuated Spine
Mar 01, 2024



Balancing oneself using the spine is a physiological alignment of the body posture in the most efficient manner by the muscular forces for mammals. For this reason, we can see many disabled quadruped animals can still stand or walk even with three limbs. This paper investigates the optimization of dynamic balance during trot gait based on the spatial relationship between the center of mass (CoM) and support area influenced by spinal flexion. During trotting, the robot balance is significantly influenced by the distance of the CoM to the support area formed by diagonal footholds. In this context, lateral spinal flexion, which is able to modify the position of footholds, holds promise for optimizing balance during trotting. This paper explores this phenomenon using a rat robot equipped with a soft actuated spine. Based on the lateral flexion of the spine, we establish a kinematic model to quantify the impact of spinal flexion on robot balance during trot gait. Subsequently, we develop an optimized controller for spinal flexion, designed to enhance balance without altering the leg locomotion. The effectiveness of our proposed controller is evaluated through extensive simulations and physical experiments conducted on a rat robot. Compared to both a non-spine based trot gait controller and a trot gait controller with lateral spinal flexion, our proposed optimized controller effectively improves the dynamic balance of the robot and retains the desired locomotion during trotting.
Autonomous Driving Simulator based on Neurorobotics Platform
Dec 31, 2022



There are many artificial intelligence algorithms for autonomous driving, but directly installing these algorithms on vehicles is unrealistic and expensive. At the same time, many of these algorithms need an environment to train and optimize. Simulation is a valuable and meaningful solution with training and testing functions, and it can say that simulation is a critical link in the autonomous driving world. There are also many different applications or systems of simulation from companies or academies such as SVL and Carla. These simulators flaunt that they have the closest real-world simulation, but their environment objects, such as pedestrians and other vehicles around the agent-vehicle, are already fixed programmed. They can only move along the pre-setting trajectory, or random numbers determine their movements. What is the situation when all environmental objects are also installed by Artificial Intelligence, or their behaviors are like real people or natural reactions of other drivers? This problem is a blind spot for most of the simulation applications, or these applications cannot be easy to solve this problem. The Neurorobotics Platform from the TUM team of Prof. Alois Knoll has the idea about "Engines" and "Transceiver Functions" to solve the multi-agents problem. This report will start with a little research on the Neurorobotics Platform and analyze the potential and possibility of developing a new simulator to achieve the true real-world simulation goal. Then based on the NRP-Core Platform, this initial development aims to construct an initial demo experiment. The consist of this report starts with the basic knowledge of NRP-Core and its installation, then focus on the explanation of the necessary components for a simulation experiment, at last, about the details of constructions for the autonomous driving system, which is integrated object detection and autonomous control.
A Biologically Inspired Simultaneous Localization and Mapping System Based on LiDAR Sensor
Sep 27, 2021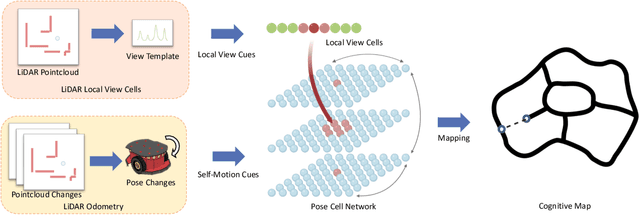
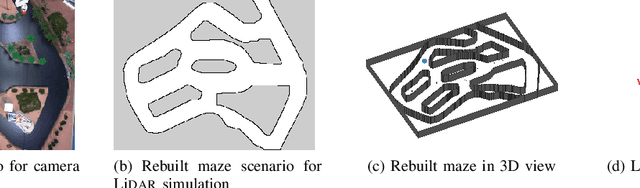
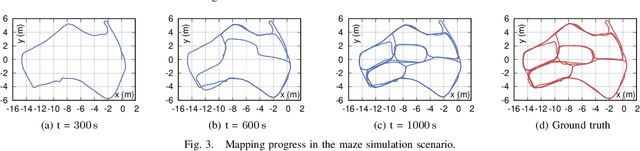

Simultaneous localization and mapping (SLAM) is one of the essential techniques and functionalities used by robots to perform autonomous navigation tasks. Inspired by the rodent hippocampus, this paper presents a biologically inspired SLAM system based on a LiDAR sensor using a hippocampal model to build a cognitive map and estimate the robot pose in indoor environments. Based on the biologically inspired model, the SLAM system using point cloud data from a LiDAR sensor is capable of leveraging the self-motion cues from the LiDAR odometry and the local view cues from the LiDAR local view cells to build a cognitive map and estimate the robot pose. Experiment results show that the proposed SLAM system is highly applicable and sufficiently accurate for LiDAR-based SLAM tasks in both simulation and indoor environments.