 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Biologically Inspired Simultaneous Localization and Mapping System Based on LiDAR Sensor
Paper and Code
Sep 27, 2021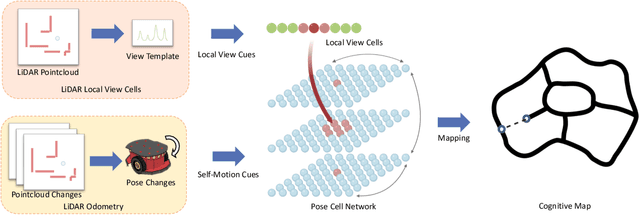

Simultaneous localization and mapping (SLAM) is one of the essential techniques and functionalities used by robots to perform autonomous navigation tasks. Inspired by the rodent hippocampus, this paper presents a biologically inspired SLAM system based on a LiDAR sensor using a hippocampal model to build a cognitive map and estimate the robot pose in indoor environments. Based on the biologically inspired model, the SLAM system using point cloud data from a LiDAR sensor is capable of leveraging the self-motion cues from the LiDAR odometry and the local view cues from the LiDAR local view cells to build a cognitive map and estimate the robot pose. Experiment results show that the proposed SLAM system is highly applicable and sufficiently accurate for LiDAR-based SLAM tasks in both simulation and indoor environments.