 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMitigating distribution shift in machine learning-augmented hybrid simulation
Jan 17, 2024


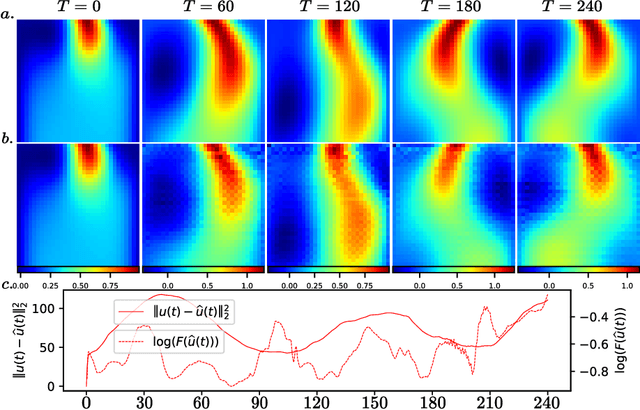
We study the problem of distribution shift generally arising in machine-learning augmented hybrid simulation, where parts of simulation algorithms are replaced by data-driven surrogates. We first establish a mathematical framework to understand the structure of machine-learning augmented hybrid simulation problems, and the cause and effect of the associated distribution shift. We show correlations between distribution shift and simulation error both numerically and theoretically. Then, we propose a simple methodology based on tangent-space regularized estimator to control the distribution shift, thereby improving the long-term accuracy of the simulation results. In the linear dynamics case, we provide a thorough theoretical analysis to quantify the effectiveness of the proposed method. Moreover, we conduct several numerical experiments, including simulating a partially known reaction-diffusion equation and solving Navier-Stokes equations using the projection method with a data-driven pressure solver. In all cases, we observe marked improvements in simulation accuracy under the proposed method, especially for systems with high degrees of distribution shift, such as those with relatively strong non-linear reaction mechanisms, or flows at large Reynolds numbers.
Scaling Limits of the Wasserstein information matrix on Gaussian Mixture Models
Sep 22, 2023We consider the Wasserstein metric on the Gaussian mixture models (GMMs), which is defined as the pullback of the full Wasserstein metric on the space of smooth probability distributions with finite second moment. It derives a class of Wasserstein metrics on probability simplices over one-dimensional bounded homogeneous lattices via a scaling limit of the Wasserstein metric on GMMs. Specifically, for a sequence of GMMs whose variances tend to zero, we prove that the limit of the Wasserstein metric exists after certain renormalization. Generalizations of this metric in general GMMs are established, including inhomogeneous lattice models whose lattice gaps are not the same, extended GMMs whose mean parameters of Gaussian components can also change, and the second-order metric containing high-order information of the scaling limit. We further study the Wasserstein gradient flows on GMMs for three typical functionals: potential, internal, and interaction energies. Numerical examples demonstrate the effectiveness of the proposed GMM models for approximating Wasserstein gradient flows.
SocialVisTUM: An Interactive Visualization Toolkit for Correlated Neural Topic Models on Social Media Opinion Mining
Oct 20, 2021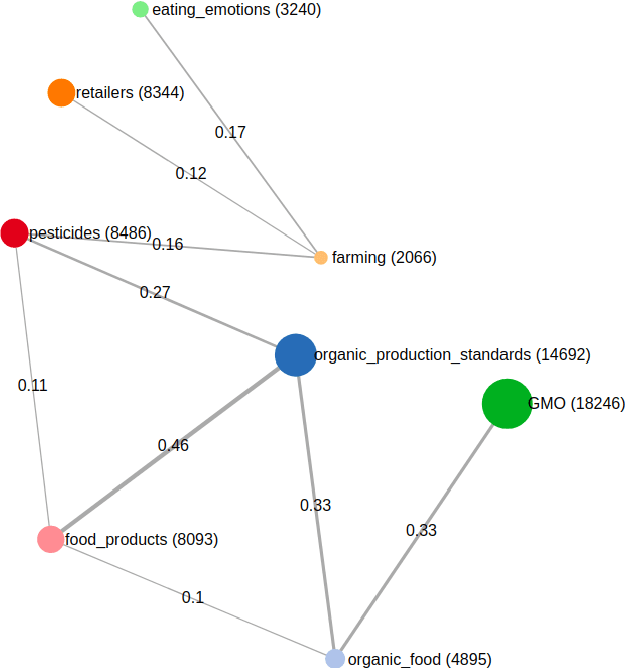

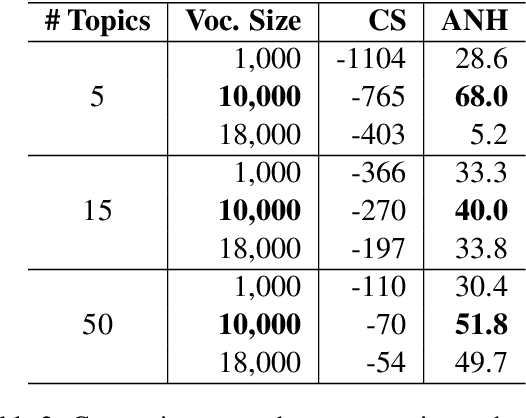
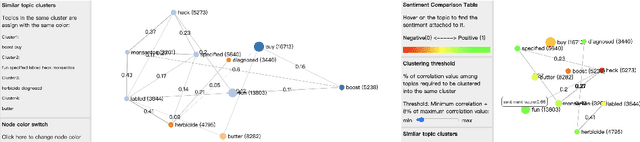
Recent research in opinion mining proposed word embedding-based topic modeling methods that provide superior coherence compared to traditional topic modeling. In this paper, we demonstrate how these methods can be used to display correlated topic models on social media texts using SocialVisTUM, our proposed interactive visualization toolkit. It displays a graph with topics as nodes and their correlations as edges. Further details are displayed interactively to support the exploration of large text collections, e.g., representative words and sentences of topics, topic and sentiment distributions, hierarchical topic clustering, and customizable, predefined topic labels. The toolkit optimizes automatically on custom data for optimal coherence. We show a working instance of the toolkit on data crawled from English social media discussions about organic food consumption. The visualization confirms findings of a qualitative consumer research study. SocialVisTUM and its training procedures are accessible online.
* Demo paper accepted for publication on RANLP 2021; 8 pages, 5 figures, 1 table
A Biologically Inspired Simultaneous Localization and Mapping System Based on LiDAR Sensor
Sep 27, 2021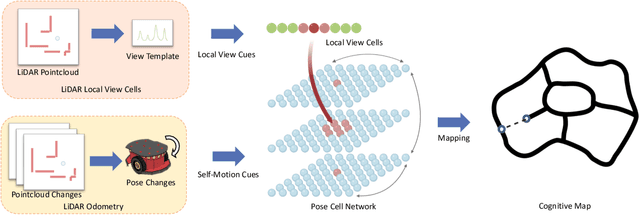
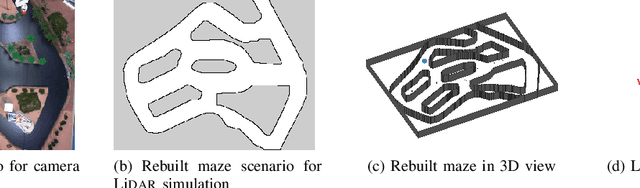
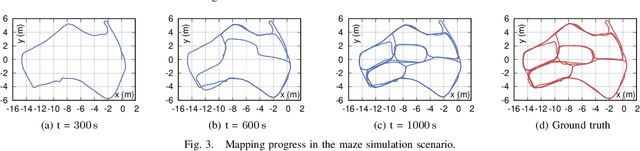

Simultaneous localization and mapping (SLAM) is one of the essential techniques and functionalities used by robots to perform autonomous navigation tasks. Inspired by the rodent hippocampus, this paper presents a biologically inspired SLAM system based on a LiDAR sensor using a hippocampal model to build a cognitive map and estimate the robot pose in indoor environments. Based on the biologically inspired model, the SLAM system using point cloud data from a LiDAR sensor is capable of leveraging the self-motion cues from the LiDAR odometry and the local view cues from the LiDAR local view cells to build a cognitive map and estimate the robot pose. Experiment results show that the proposed SLAM system is highly applicable and sufficiently accurate for LiDAR-based SLAM tasks in both simulation and indoor environments.