 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlowCalib: LiDAR-to-Vehicle Miscalibration Detection using Scene Flows
Jan 30, 2026Accurate sensor-to-vehicle calibration is essential for safe autonomous driving. Angular misalignments of LiDAR sensors can lead to safety-critical issues during autonomous operation. However, current methods primarily focus on correcting sensor-to-sensor errors without considering the miscalibration of individual sensors that cause these errors in the first place. We introduce FlowCalib, the first framework that detects LiDAR-to-vehicle miscalibration using motion cues from the scene flow of static objects. Our approach leverages the systematic bias induced by rotational misalignment in the flow field generated from sequential 3D point clouds, eliminating the need for additional sensors. The architecture integrates a neural scene flow prior for flow estimation and incorporates a dual-branch detection network that fuses learned global flow features with handcrafted geometric descriptors. These combined representations allow the system to perform two complementary binary classification tasks: a global binary decision indicating whether misalignment is present and separate, axis-specific binary decisions indicating whether each rotational axis is misaligned. Experiments on the nuScenes dataset demonstrate FlowCalib's ability to robustly detect miscalibration, establishing a benchmark for sensor-to-vehicle miscalibration detection.
Cal or No Cal? -- Real-Time Miscalibration Detection of LiDAR and Camera Sensors
Mar 31, 2025The goal of extrinsic calibration is the alignment of sensor data to ensure an accurate representation of the surroundings and enable sensor fusion applications. From a safety perspective, sensor calibration is a key enabler of autonomous driving. In the current state of the art, a trend from target-based offline calibration towards targetless online calibration can be observed. However, online calibration is subject to strict real-time and resource constraints which are not met by state-of-the-art methods. This is mainly due to the high number of parameters to estimate, the reliance on geometric features, or the dependence on specific vehicle maneuvers. To meet these requirements and ensure the vehicle's safety at any time, we propose a miscalibration detection framework that shifts the focus from the direct regression of calibration parameters to a binary classification of the calibration state, i.e., calibrated or miscalibrated. Therefore, we propose a contrastive learning approach that compares embedded features in a latent space to classify the calibration state of two different sensor modalities. Moreover, we provide a comprehensive analysis of the feature embeddings and challenging calibration errors that highlight the performance of our approach. As a result, our method outperforms the current state-of-the-art in terms of detection performance, inference time, and resource demand. The code is open source and available on https://github.com/TUMFTM/MiscalibrationDetection.
CaLiV: LiDAR-to-Vehicle Calibration of Arbitrary Sensor Setups via Object Reconstruction
Mar 31, 2025


In autonomous systems, sensor calibration is essential for a safe and efficient navigation in dynamic environments. Accurate calibration is a prerequisite for reliable perception and planning tasks such as object detection and obstacle avoidance. Many existing LiDAR calibration methods require overlapping fields of view, while others use external sensing devices or postulate a feature-rich environment. In addition, Sensor-to-Vehicle calibration is not supported by the vast majority of calibration algorithms. In this work, we propose a novel target-based technique for extrinsic Sensor-to-Sensor and Sensor-to-Vehicle calibration of multi-LiDAR systems called CaLiV. This algorithm works for non-overlapping FoVs, as well as arbitrary calibration targets, and does not require any external sensing devices. First, we apply motion to produce FoV overlaps and utilize a simple unscented Kalman filter to obtain vehicle poses. Then, we use the Gaussian mixture model-based registration framework GMMCalib to align the point clouds in a common calibration frame. Finally, we reduce the task of recovering the sensor extrinsics to a minimization problem. We show that both translational and rotational Sensor-to-Sensor errors can be solved accurately by our method. In addition, all Sensor-to-Vehicle rotation angles can also be calibrated with high accuracy. We validate the simulation results in real-world experiments. The code is open source and available on https://github.com/TUMFTM/CaLiV.
Multi-LiCa: A Motion and Targetless Multi LiDAR-to-LiDAR Calibration Framework
Jan 19, 2025



Today's autonomous vehicles rely on a multitude of sensors to perceive their environment. To improve the perception or create redundancy, the sensor's alignment relative to each other must be known. With Multi-LiCa, we present a novel approach for the alignment, e.g. calibration. We present an automatic motion- and targetless approach for the extrinsic multi LiDAR-to-LiDAR calibration without the need for additional sensor modalities or an initial transformation input. We propose a two-step process with feature-based matching for the coarse alignment and a GICP-based fine registration in combination with a cost-based matching strategy. Our approach can be applied to any number of sensors and positions if there is a partial overlap between the field of view of single sensors. We show that our pipeline is better generalized to different sensor setups and scenarios and is on par or better in calibration accuracy than existing approaches. The presented framework is integrated in ROS 2 but can also be used as a standalone application. To build upon our work, our source code is available at: https://github.com/TUMFTM/Multi_LiCa.
GMMCalib: Extrinsic Calibration of LiDAR Sensors using GMM-based Joint Registration
Apr 08, 2024



State-of-the-art LiDAR calibration frameworks mainly use non-probabilistic registration methods such as Iterative Closest Point (ICP) and its variants. These methods suffer from biased results due to their pair-wise registration procedure as well as their sensitivity to initialization and parameterization. This often leads to misalignments in the calibration process. Probabilistic registration methods compensate for these drawbacks by specifically modeling the probabilistic nature of the observations. This paper presents GMMCalib, an automatic target-based extrinsic calibration approach for multi-LiDAR systems. Using an implementation of a Gaussian Mixture Model (GMM)-based registration method that allows joint registration of multiple point clouds, this data-driven approach is compared to ICP algorithms. We perform simulation experiments using the digital twin of the EDGAR research vehicle and validate the results in a real-world environment. We also address the local minima problem of local registration methods for extrinsic sensor calibration and use a distance-based metric to evaluate the calibration results. Our results show that an increase in robustness against sensor miscalibrations can be achieved by using GMM-based registration algorithms. The code is open source and available on GitHub.
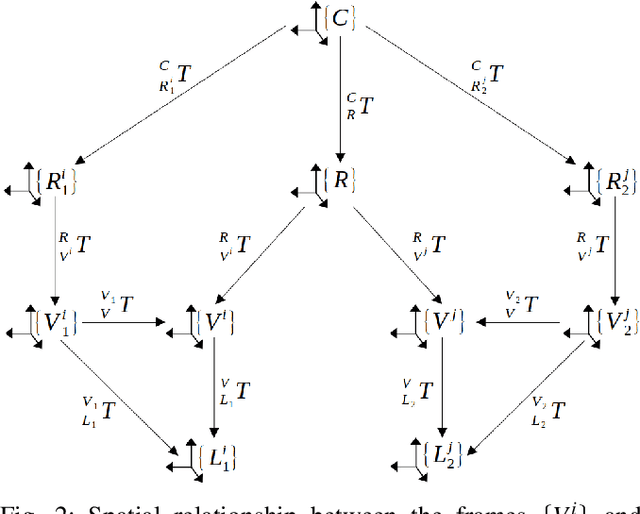
EDGAR: An Autonomous Driving Research Platform -- From Feature Development to Real-World Application
Sep 27, 2023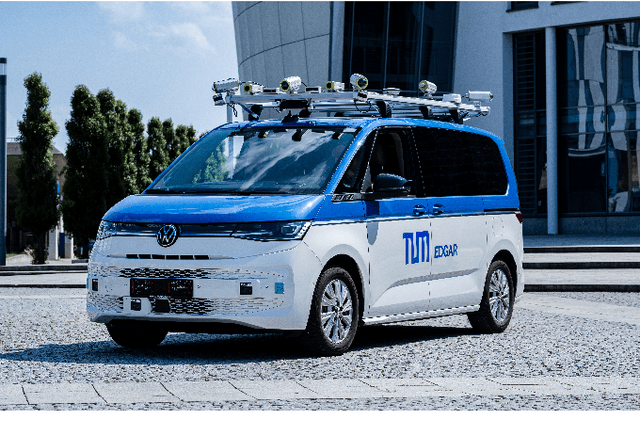
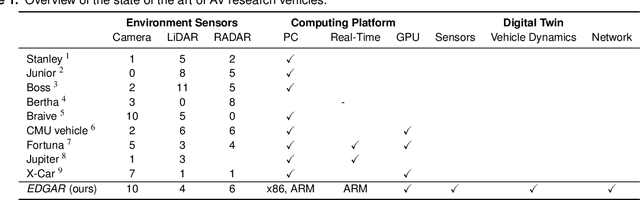

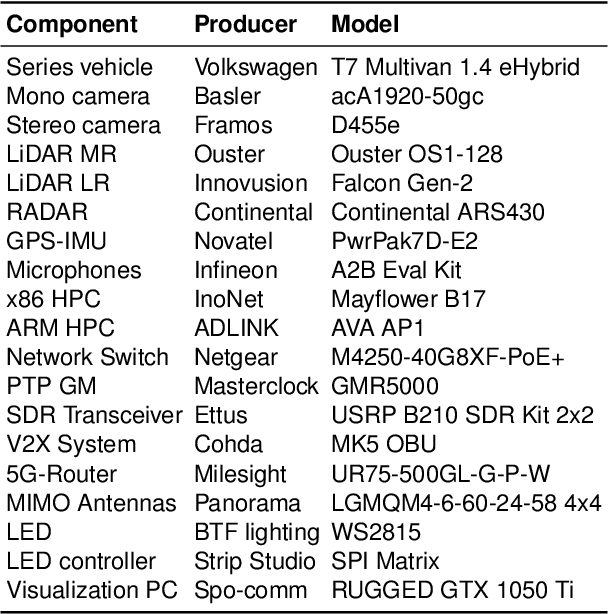
While current research and development of autonomous driving primarily focuses on developing new features and algorithms, the transfer from isolated software components into an entire software stack has been covered sparsely. Besides that, due to the complexity of autonomous software stacks and public road traffic, the optimal validation of entire stacks is an open research problem. Our paper targets these two aspects. We present our autonomous research vehicle EDGAR and its digital twin, a detailed virtual duplication of the vehicle. While the vehicle's setup is closely related to the state of the art, its virtual duplication is a valuable contribution as it is crucial for a consistent validation process from simulation to real-world tests. In addition, different development teams can work with the same model, making integration and testing of the software stacks much easier, significantly accelerating the development process. The real and virtual vehicles are embedded in a comprehensive development environment, which is also introduced. All parameters of the digital twin are provided open-source at https://github.com/TUMFTM/edgar_digital_twin.