 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCLRNet: Targetless Extrinsic Calibration for Camera, Lidar and 4D Radar Using Deep Learning
Mar 16, 2026In this paper, we address extrinsic calibration for camera, lidar, and 4D radar sensors. Accurate extrinsic calibration of radar remains a challenge due to the sparsity of its data. We propose CLRNet, a novel, multi-modal end-to-end deep learning (DL) calibration network capable of addressing joint camera-lidar-radar calibration, or pairwise calibration between any two of these sensors. We incorporate equirectangular projection, camera-based depth image prediction, additional radar channels, and leverage lidar with a shared feature space and loop closure loss. In extensive experiments using the View-of-Delft and Dual-Radar datasets, we demonstrate superior calibration accuracy compared to existing state-of-the-art methods, reducing both median translational and rotational calibration errors by at least 50%. Finally, we examine the domain transfer capabilities of the proposed network and baselines, when evaluating across datasets. The code will be made publicly available upon acceptance at: https://github.com/tudelft-iv.
DRIFT: Dual-Representation Inter-Fusion Transformer for Automated Driving Perception with 4D Radar Point Clouds
Mar 12, 20264D radars, which provide 3D point cloud data along with Doppler velocity, are attractive components of modern automated driving systems due to their low cost and robustness under adverse weather conditions. However, they provide a significantly lower point cloud density than LiDAR sensors. This makes it important to exploit not only local but also global contextual scene information. This paper proposes DRIFT, a model that effectively captures and fuses both local and global contexts through a dual-path architecture. The model incorporates a point path to aggregate fine-grained local features and a pillar path to encode coarse-grained global features. These two parallel paths are intertwined via novel feature-sharing layers at multiple stages, enabling full utilization of both representations. DRIFT is evaluated on the widely used View-of-Delft (VoD) dataset and a proprietary internal dataset. It outperforms the baselines on the tasks of object detection and/or free road estimation. For example, DRIFT achieves a mean average precision (mAP) of 52.6% (compared to, say, 45.4% of CenterPoint) on the VoD dataset.
4DRC-OCC: Robust Semantic Occupancy Prediction Through Fusion of 4D Radar and Camera
Mar 08, 2026Autonomous driving requires robust perception across diverse environmental conditions, yet 3D semantic occupancy prediction remains challenging under adverse weather and lighting. In this work, we present the first study combining 4D radar and camera data for 3D semantic occupancy prediction. Our fusion leverages the complementary strengths of both modalities: 4D radar provides reliable range, velocity, and angle measurements in challenging conditions, while cameras contribute rich semantic and texture information. We further show that integrating depth cues from camera pixels enables lifting 2D images to 3D, improving scene reconstruction accuracy. Additionally, we introduce a fully automatically labeled dataset for training semantic occupancy models, substantially reducing reliance on costly manual annotation. Experiments demonstrate the robustness of 4D radar across diverse scenarios, highlighting its potential to advance autonomous vehicle perception.
4D-RaDiff: Latent Diffusion for 4D Radar Point Cloud Generation
Dec 16, 2025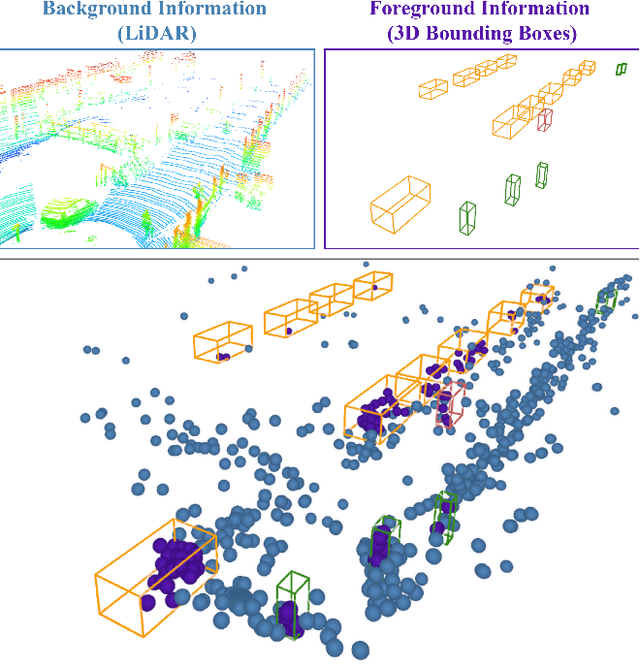

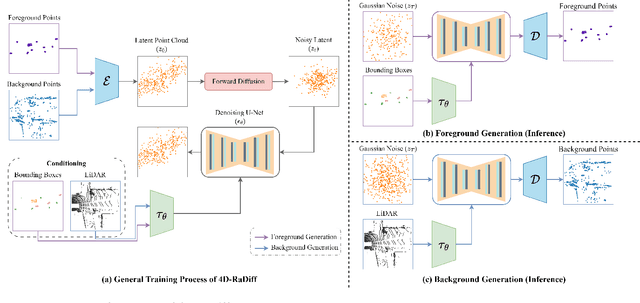
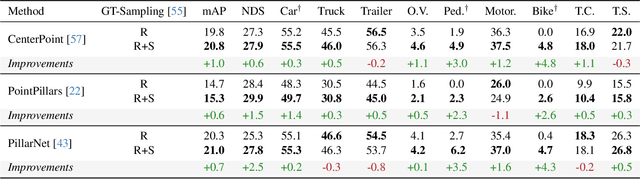
Automotive radar has shown promising developments in environment perception due to its cost-effectiveness and robustness in adverse weather conditions. However, the limited availability of annotated radar data poses a significant challenge for advancing radar-based perception systems. To address this limitation, we propose a novel framework to generate 4D radar point clouds for training and evaluating object detectors. Unlike image-based diffusion, our method is designed to consider the sparsity and unique characteristics of radar point clouds by applying diffusion to a latent point cloud representation. Within this latent space, generation is controlled via conditioning at either the object or scene level. The proposed 4D-RaDiff converts unlabeled bounding boxes into high-quality radar annotations and transforms existing LiDAR point cloud data into realistic radar scenes. Experiments demonstrate that incorporating synthetic radar data of 4D-RaDiff as data augmentation method during training consistently improves object detection performance compared to training on real data only. In addition, pre-training on our synthetic data reduces the amount of required annotated radar data by up to 90% while achieving comparable object detection performance.
LeAP: Consistent multi-domain 3D labeling using Foundation Models
Feb 06, 2025Availability of datasets is a strong driver for research on 3D semantic understanding, and whilst obtaining unlabeled 3D point cloud data is straightforward, manually annotating this data with semantic labels is time-consuming and costly. Recently, Vision Foundation Models (VFMs) enable open-set semantic segmentation on camera images, potentially aiding automatic labeling. However,VFMs for 3D data have been limited to adaptations of 2D models, which can introduce inconsistencies to 3D labels. This work introduces Label Any Pointcloud (LeAP), leveraging 2D VFMs to automatically label 3D data with any set of classes in any kind of application whilst ensuring label consistency. Using a Bayesian update, point labels are combined into voxels to improve spatio-temporal consistency. A novel 3D Consistency Network (3D-CN) exploits 3D information to further improve label quality. Through various experiments, we show that our method can generate high-quality 3D semantic labels across diverse fields without any manual labeling. Further, models adapted to new domains using our labels show up to a 34.2 mIoU increase in semantic segmentation tasks.
A Deep Automotive Radar Detector using the RaDelft Dataset
Jun 07, 2024The detection of multiple extended targets in complex environments using high-resolution automotive radar is considered. A data-driven approach is proposed where unlabeled synchronized lidar data is used as ground truth to train a neural network with only radar data as input. To this end, the novel, large-scale, real-life, and multi-sensor RaDelft dataset has been recorded using a demonstrator vehicle in different locations in the city of Delft. The dataset, as well as the documentation and example code, is publicly available for those researchers in the field of automotive radar or machine perception. The proposed data-driven detector is able to generate lidar-like point clouds using only radar data from a high-resolution system, which preserves the shape and size of extended targets. The results are compared against conventional CFAR detectors as well as variations of the method to emulate the available approaches in the literature, using the probability of detection, the probability of false alarm, and the Chamfer distance as performance metrics. Moreover, an ablation study was carried out to assess the impact of Doppler and temporal information on detection performance. The proposed method outperforms the different baselines in terms of Chamfer distance, achieving a reduction of 75% against conventional CFAR detectors and 10% against the modified state-of-the-art deep learning-based approaches.
DPFT: Dual Perspective Fusion Transformer for Camera-Radar-based Object Detection
Apr 03, 2024The perception of autonomous vehicles has to be efficient, robust, and cost-effective. However, cameras are not robust against severe weather conditions, lidar sensors are expensive, and the performance of radar-based perception is still inferior to the others. Camera-radar fusion methods have been proposed to address this issue, but these are constrained by the typical sparsity of radar point clouds and often designed for radars without elevation information. We propose a novel camera-radar fusion approach called Dual Perspective Fusion Transformer (DPFT), designed to overcome these limitations. Our method leverages lower-level radar data (the radar cube) instead of the processed point clouds to preserve as much information as possible and employs projections in both the camera and ground planes to effectively use radars with elevation information and simplify the fusion with camera data. As a result, DPFT has demonstrated state-of-the-art performance on the K-Radar dataset while showing remarkable robustness against adverse weather conditions and maintaining a low inference time. The code is made available as open-source software under https://github.com/TUMFTM/DPFT.
See Further Than CFAR: a Data-Driven Radar Detector Trained by Lidar
Feb 27, 2024In this paper, we address the limitations of traditional constant false alarm rate (CFAR) target detectors in automotive radars, particularly in complex urban environments with multiple objects that appear as extended targets. We propose a data-driven radar target detector exploiting a highly efficient 2D CNN backbone inspired by the computer vision domain. Our approach is distinguished by a unique cross sensor supervision pipeline, enabling it to learn exclusively from unlabeled synchronized radar and lidar data, thus eliminating the need for costly manual object annotations. Using a novel large-scale, real-life multi-sensor dataset recorded in various driving scenarios, we demonstrate that the proposed detector generates dense, lidar-like point clouds, achieving a lower Chamfer distance to the reference lidar point clouds than CFAR detectors. Overall, it significantly outperforms CFAR baselines detection accuracy.
Hidden Gems: 4D Radar Scene Flow Learning Using Cross-Modal Supervision
Mar 17, 2023



This work proposes a novel approach to 4D radar-based scene flow estimation via cross-modal learning. Our approach is motivated by the co-located sensing redundancy in modern autonomous vehicles. Such redundancy implicitly provides various forms of supervision cues to the radar scene flow estimation. Specifically, we introduce a multi-task model architecture for the identified cross-modal learning problem and propose loss functions to opportunistically engage scene flow estimation using multiple cross-modal constraints for effective model training. Extensive experiments show the state-of-the-art performance of our method and demonstrate the effectiveness of cross-modal supervised learning to infer more accurate 4D radar scene flow. We also show its usefulness to two subtasks - motion segmentation and ego-motion estimation. Our source code will be available on https://github.com/Toytiny/CMFlow.
CNN based Road User Detection using the 3D Radar Cube
Apr 25, 2020
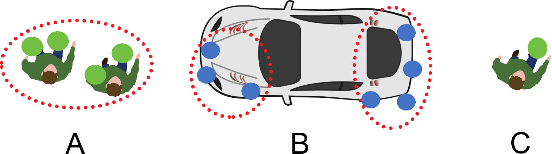
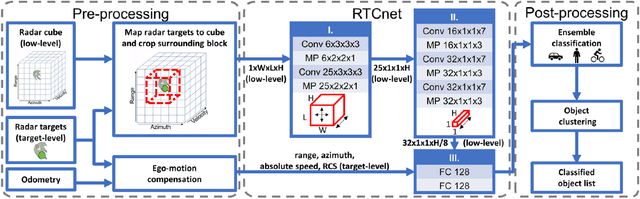
This letter presents a novel radar based, single-frame, multi-class detection method for moving road users (pedestrian, cyclist, car), which utilizes low-level radar cube data. The method provides class information both on the radar target- and object-level. Radar targets are classified individually after extending the target features with a cropped block of the 3D radar cube around their positions, thereby capturing the motion of moving parts in the local velocity distribution. A Convolutional Neural Network (CNN) is proposed for this classification step. Afterwards, object proposals are generated with a clustering step, which not only considers the radar targets' positions and velocities, but their calculated class scores as well. In experiments on a real-life dataset we demonstrate that our method outperforms the state-of-the-art methods both target- and object-wise by reaching an average of 0.70 (baseline: 0.68) target-wise and 0.56 (baseline: 0.48) object-wise F1 score. Furthermore, we examine the importance of the used features in an ablation study.