 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrouped Target Tracking and Seamless People Counting with a 24 GHz MIMO FMCW
Apr 07, 2025The problem of radar-based tracking of groups of people moving together and counting their numbers in indoor environments is considered here. A novel processing pipeline to track groups of people moving together and count their numbers is proposed and validated. The pipeline is specifically designed to deal with frequent changes of direction and stop & go movements typical of indoor activities. The proposed approach combines a tracker with a classifier to count the number of grouped people; this uses both spatial features extracted from range-azimuth maps, and Doppler frequency features extracted with wavelet decomposition. Thus, the pipeline outputs over time both the location and number of people present. The proposed approach is verified with experimental data collected with a 24 GHz Frequency Modulated Continuous Wave (FMCW) radar. It is shown that the proposed method achieves 95.59% accuracy in counting the number of people, and a tracking metric OSPA of 0.338. Furthermore, the performance is analyzed as a function of different relevant variables such as feature combinations and scenarios.
CDMA and Non-Uniform Multiplexing: Dynamic Range in MIMO Radar Waveforms
Aug 26, 2024This paper presents a performance comparison of various MIMO radar multiplexing approaches where the increasing number of transmitters adversely affects the dynamic range of the resultant MIMO system. The investigated multiplexing techniques are code-division multiplexing in phase-coded frequency-modulated continuous wave (FMCW) and phase-modulated continuous wave (PMCW) radar. Additionally, random fast/slow time multiplexing in time and frequency is considered for frequency-modulated continuous wave and orthogonal frequency-division multiplexing (OFDM) radars. The comparative analysis is conducted through simulations, evaluating the scalability with the number of transmitters and addressing other pertinent implementation concerns. The findings provide insights into the trade-offs associated with each approach, aiding in selecting suitable MIMO radar multiplexing strategies for practical applications.
A Deep Automotive Radar Detector using the RaDelft Dataset
Jun 07, 2024The detection of multiple extended targets in complex environments using high-resolution automotive radar is considered. A data-driven approach is proposed where unlabeled synchronized lidar data is used as ground truth to train a neural network with only radar data as input. To this end, the novel, large-scale, real-life, and multi-sensor RaDelft dataset has been recorded using a demonstrator vehicle in different locations in the city of Delft. The dataset, as well as the documentation and example code, is publicly available for those researchers in the field of automotive radar or machine perception. The proposed data-driven detector is able to generate lidar-like point clouds using only radar data from a high-resolution system, which preserves the shape and size of extended targets. The results are compared against conventional CFAR detectors as well as variations of the method to emulate the available approaches in the literature, using the probability of detection, the probability of false alarm, and the Chamfer distance as performance metrics. Moreover, an ablation study was carried out to assess the impact of Doppler and temporal information on detection performance. The proposed method outperforms the different baselines in terms of Chamfer distance, achieving a reduction of 75% against conventional CFAR detectors and 10% against the modified state-of-the-art deep learning-based approaches.
Analysis of Processing Pipelines for Indoor Human Tracking using FMCW radar
Mar 15, 2024In this paper, the problem of formulating effective processing pipelines for indoor human tracking is investigated, with the usage of a Multiple Input Multiple Output (MIMO) Frequency Modulated Continuous Wave (FMCW) radar. Specifically, two processing pipelines starting with detections on the Range-Azimuth (RA) maps and the Range-Doppler (RD) maps are formulated and compared, together with subsequent clustering and tracking algorithms and their relevant parameters. Experimental results are presented to validate and assess both pipelines, using a 24 GHz commercial radar platform with 250 MHz bandwidth and 15 virtual channels. Scenarios where 1 and 2 people move in an indoor environment are considered, and the influence of the number of virtual channels and detectors' parameters is discussed. The characteristics and limitations of both pipelines are presented, with the approach based on detections on RA maps showing in general more robust results.
See Further Than CFAR: a Data-Driven Radar Detector Trained by Lidar
Feb 27, 2024In this paper, we address the limitations of traditional constant false alarm rate (CFAR) target detectors in automotive radars, particularly in complex urban environments with multiple objects that appear as extended targets. We propose a data-driven radar target detector exploiting a highly efficient 2D CNN backbone inspired by the computer vision domain. Our approach is distinguished by a unique cross sensor supervision pipeline, enabling it to learn exclusively from unlabeled synchronized radar and lidar data, thus eliminating the need for costly manual object annotations. Using a novel large-scale, real-life multi-sensor dataset recorded in various driving scenarios, we demonstrate that the proposed detector generates dense, lidar-like point clouds, achieving a lower Chamfer distance to the reference lidar point clouds than CFAR detectors. Overall, it significantly outperforms CFAR baselines detection accuracy.
3D high-resolution imaging algorithm using 1D MIMO array for autonomous driving application
Feb 20, 2024The problem of 3D high-resolution imaging in automotive multiple-input multiple-output (MIMO) side-looking radar using a 1D array is considered. The concept of motion-enhanced snapshots is introduced for generating larger apertures in the azimuth dimension. For the first time, 3D imaging capabilities can be achieved with high angular resolution using a 1D MIMO antenna array, which can alleviate the requirement for large radar systems in autonomous vehicles. The robustness to variations in the vehicle's movement trajectory is also considered and addressed with relevant compensations in the steering vector. The available degrees of freedom as well as the Signal to Noise Ratio (SNR) are shown to increase with the proposed method compared to conventional imaging approaches. The performance of the algorithm has been studied in simulations, and validated with experimental data collected in a realistic driving scenario.
Self-Supervised Learning for Enhancing Angular Resolution in Automotive MIMO Radars
Jan 24, 2023A novel framework to enhance the angular resolution of automotive radars is proposed. An approach to enlarge the antenna aperture using artificial neural networks is developed using a self-supervised learning scheme. Data from a high angular resolution radar, i.e., a radar with a large antenna aperture, is used to train a deep neural network to extrapolate the antenna element's response. Afterward, the trained network is used to enhance the angular resolution of compact, low-cost radars. One million scenarios are simulated in a Monte-Carlo fashion, varying the number of targets, their Radar Cross Section (RCS), and location to evaluate the method's performance. Finally, the method is tested in real automotive data collected outdoors with a commercial radar system. A significant increase in the ability to resolve targets is demonstrated, which can translate to more accurate and faster responses from the planning and decision making system of the vehicle.
Generalized Matrix-Pencil Approach to Estimation of Complex Exponentials with Gapped Data
Oct 27, 2022A generalized matrix-pencil approach is proposed for the estimation of complex exponential components with segmented signal samples, which is very efficient and provides super-resolution estimations. It is applicable to the signals sampled segmentally with the same sampling frequency and direction of arrival (DOA) estimation with distributed arrays within which array elements are placed uniformly with the same inter-element spacing.
Smoothed Phase-Coded FMCW: Waveform Properties and Transceiver Architecture
Mar 14, 2022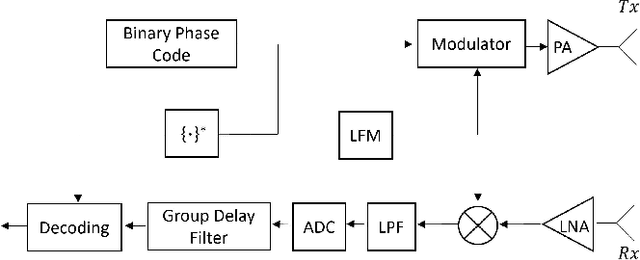
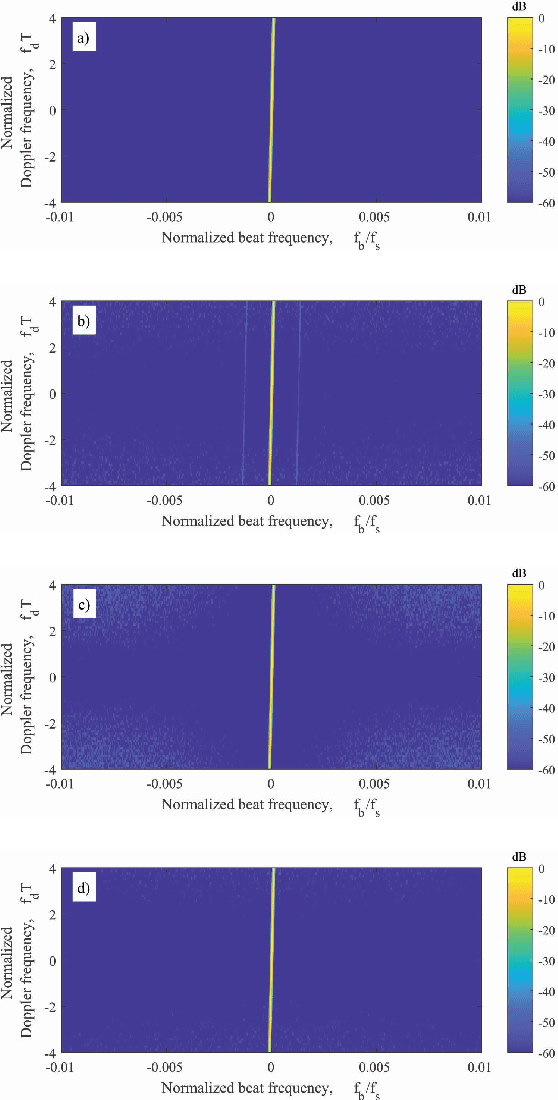
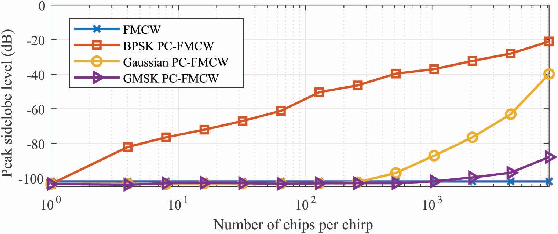
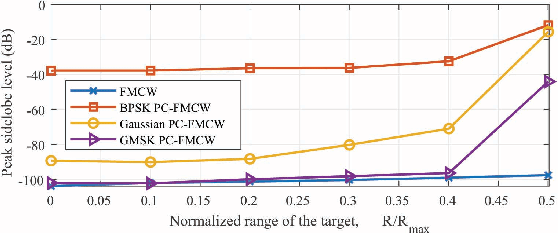
Smoothed phase-coded frequency modulated continuous waveform (SPC-FMCW), which is aimed to improve the coexistence of multiple radars operating within the same frequency bandwidth, is studied and the receiving strategy with a low ADC sampling requirement is investigated. The Gaussian filter is applied to obtain smooth phase transition, and the phase lag compensation is performed on transmitted phase code to enhance decoding. The proposed waveform is examined in different domains, and its waveform properties are analysed theoretically and demonstrated experimentally. Both the simulation and experimental results show that the introduced waveform with the investigated processing steps helps to combine all advantages of the FMCW waveform including hardware simplicity and small operational bandwidth of the receiver with advantages of the phase coding.
A Novel Approach to Vehicle Pose Estimation using Automotive Radar
Jul 20, 2021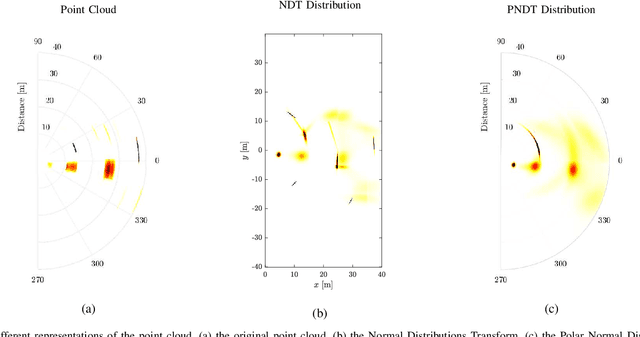
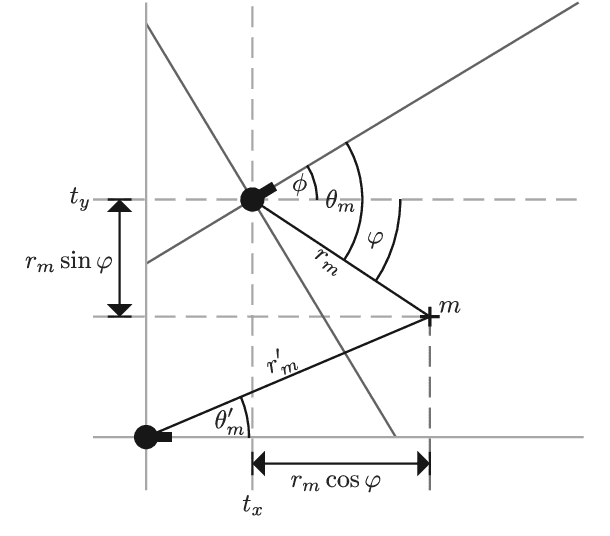
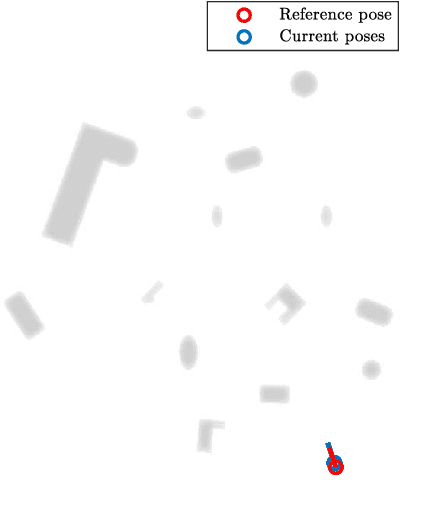
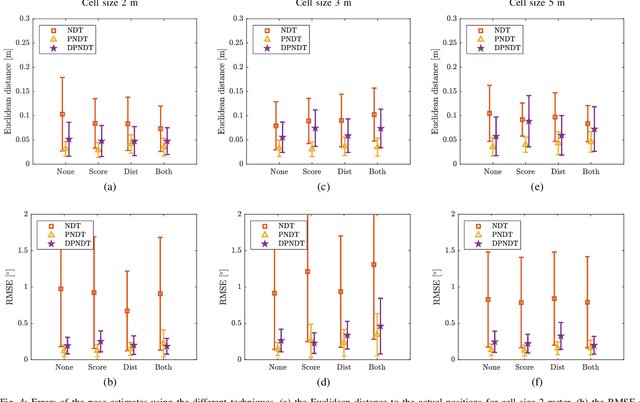
This paper presents a set of novel scan-matching techniques for vehicle pose estimation using automotive radar measurements. The proposed approach modifies the Normal Distributions Transform (NDT) -- a state-of-the-art scan-matching SLAM technique, widely used in lidar-based localization -- to account for particular aspects of radar environment perception. First, the polar NDT (PNDT) is introduced by solving the NDT problem in the polar coordinate system, natural for radar measurements. A better agreement between the measurement uncertainties and their representation in the scan-matching algorithm is achieved. Second, the extension of PNDT to take into account the Doppler measurements -- Doppler polar NDT (DPNDT) -- is proposed. Third, the SNR of detected targets is added to the optimization procedure to minimize the impact of RCS fluctuation. The improvement over the conventional NDT is demonstrated in numerical simulations and real data processing, showing the ability to decrease the localization error by a factor of 3 to 5, depending on the scenario, with a negligible increase in computational complexity. Finally, a DPNDT extension with the capability to compensate angular bias in array beam-forming is presented. Simulation results and real data processing show the possibility to correct it with the accuracy of $0.1^\circ$ almost in real-time.