 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Approach to Vehicle Pose Estimation using Automotive Radar
Paper and Code
Jul 20, 2021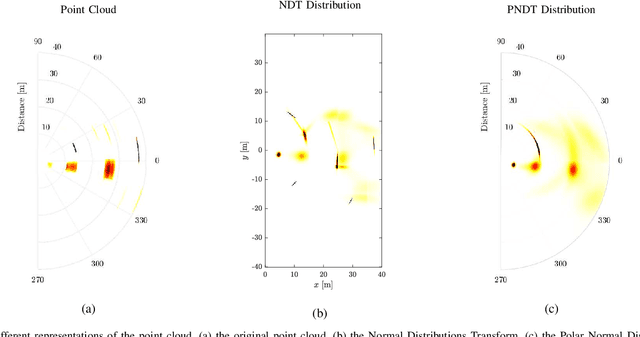
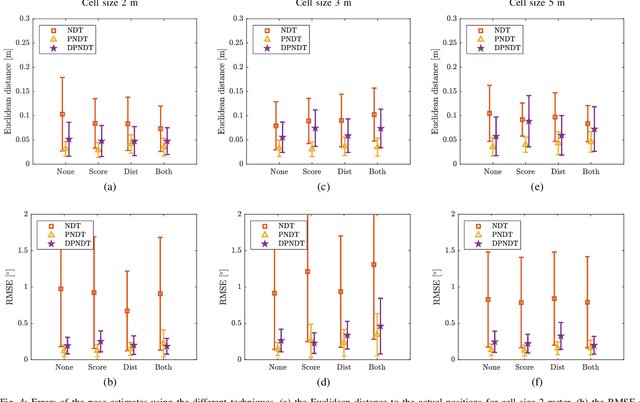
This paper presents a set of novel scan-matching techniques for vehicle pose estimation using automotive radar measurements. The proposed approach modifies the Normal Distributions Transform (NDT) -- a state-of-the-art scan-matching SLAM technique, widely used in lidar-based localization -- to account for particular aspects of radar environment perception. First, the polar NDT (PNDT) is introduced by solving the NDT problem in the polar coordinate system, natural for radar measurements. A better agreement between the measurement uncertainties and their representation in the scan-matching algorithm is achieved. Second, the extension of PNDT to take into account the Doppler measurements -- Doppler polar NDT (DPNDT) -- is proposed. Third, the SNR of detected targets is added to the optimization procedure to minimize the impact of RCS fluctuation. The improvement over the conventional NDT is demonstrated in numerical simulations and real data processing, showing the ability to decrease the localization error by a factor of 3 to 5, depending on the scenario, with a negligible increase in computational complexity. Finally, a DPNDT extension with the capability to compensate angular bias in array beam-forming is presented. Simulation results and real data processing show the possibility to correct it with the accuracy of $0.1^\circ$ almost in real-time.