 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCDMA and Non-Uniform Multiplexing: Dynamic Range in MIMO Radar Waveforms
Aug 26, 2024This paper presents a performance comparison of various MIMO radar multiplexing approaches where the increasing number of transmitters adversely affects the dynamic range of the resultant MIMO system. The investigated multiplexing techniques are code-division multiplexing in phase-coded frequency-modulated continuous wave (FMCW) and phase-modulated continuous wave (PMCW) radar. Additionally, random fast/slow time multiplexing in time and frequency is considered for frequency-modulated continuous wave and orthogonal frequency-division multiplexing (OFDM) radars. The comparative analysis is conducted through simulations, evaluating the scalability with the number of transmitters and addressing other pertinent implementation concerns. The findings provide insights into the trade-offs associated with each approach, aiding in selecting suitable MIMO radar multiplexing strategies for practical applications.
SCaRL- A Synthetic Multi-Modal Dataset for Autonomous Driving
May 27, 2024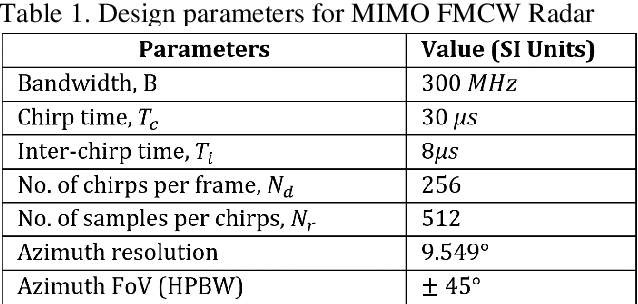
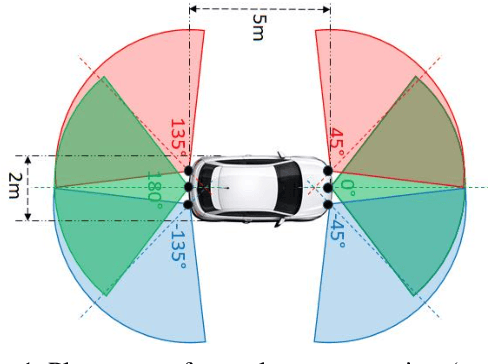
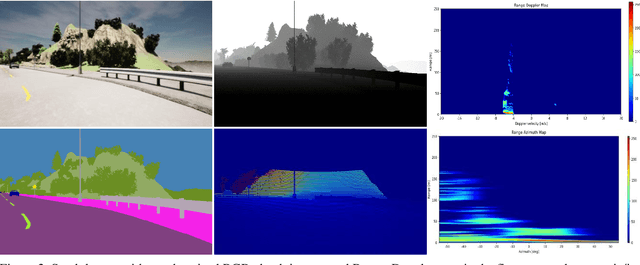
We present a novel synthetically generated multi-modal dataset, SCaRL, to enable the training and validation of autonomous driving solutions. Multi-modal datasets are essential to attain the robustness and high accuracy required by autonomous systems in applications such as autonomous driving. As deep learning-based solutions are becoming more prevalent for object detection, classification, and tracking tasks, there is great demand for datasets combining camera, lidar, and radar sensors. Existing real/synthetic datasets for autonomous driving lack synchronized data collection from a complete sensor suite. SCaRL provides synchronized Synthetic data from RGB, semantic/instance, and depth Cameras; Range-Doppler-Azimuth/Elevation maps and raw data from Radar; and 3D point clouds/2D maps of semantic, depth and Doppler data from coherent Lidar. SCaRL is a large dataset based on the CARLA Simulator, which provides data for diverse, dynamic scenarios and traffic conditions. SCaRL is the first dataset to include synthetic synchronized data from coherent Lidar and MIMO radar sensors. The dataset can be accessed here: https://fhr-ihs-sva.pages.fraunhofer.de/asp/scarl/
Sparse Reconstruction of Chirplets for Automotive FMCW Radar Interference Mitigation
Jun 10, 2021



Mutual interference in automotive radar scenarios is going to become a major concern as the density of vehicles with radar sensors in the roads increases. The present work tackles the problem of frequency modulated continuous wave (FMCW) to FMCW and continuous wave interference. In this context, we propose a signal processing technique to blindly identify and remove interference by using the fast Orthogonal Matching Pursuit (OMP) algorithm to project the interference signals in a reduced chirplet basis, and separate it from the target signal with minimal loss of information. Significant reduction of the noise-plus-interference levels are observed in both simulated and measured data, the later acquired with state of the art automotive sensors.