 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCaRL- A Synthetic Multi-Modal Dataset for Autonomous Driving
May 27, 2024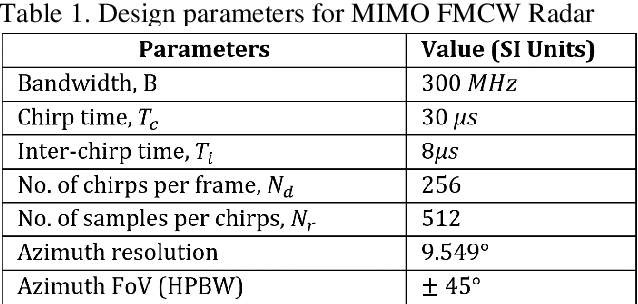
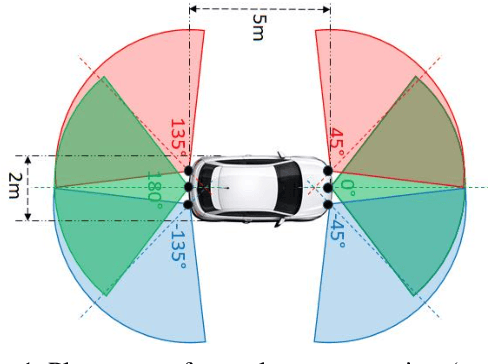
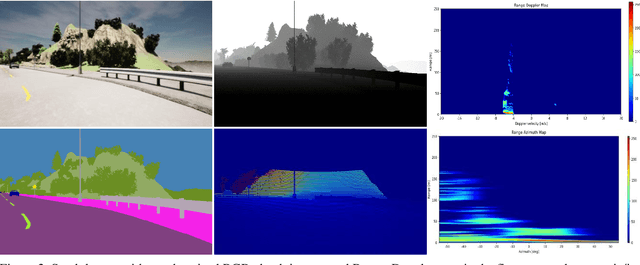
We present a novel synthetically generated multi-modal dataset, SCaRL, to enable the training and validation of autonomous driving solutions. Multi-modal datasets are essential to attain the robustness and high accuracy required by autonomous systems in applications such as autonomous driving. As deep learning-based solutions are becoming more prevalent for object detection, classification, and tracking tasks, there is great demand for datasets combining camera, lidar, and radar sensors. Existing real/synthetic datasets for autonomous driving lack synchronized data collection from a complete sensor suite. SCaRL provides synchronized Synthetic data from RGB, semantic/instance, and depth Cameras; Range-Doppler-Azimuth/Elevation maps and raw data from Radar; and 3D point clouds/2D maps of semantic, depth and Doppler data from coherent Lidar. SCaRL is a large dataset based on the CARLA Simulator, which provides data for diverse, dynamic scenarios and traffic conditions. SCaRL is the first dataset to include synthetic synchronized data from coherent Lidar and MIMO radar sensors. The dataset can be accessed here: https://fhr-ihs-sva.pages.fraunhofer.de/asp/scarl/
A Simple Domain Shifting Networkfor Generating Low Quality Images
Jun 30, 2020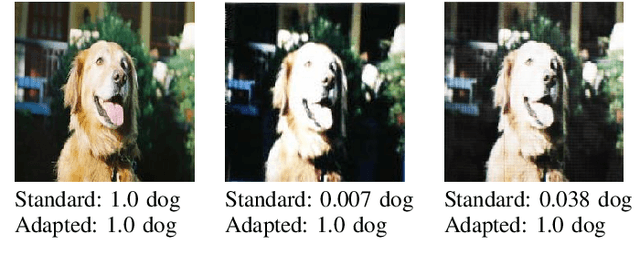
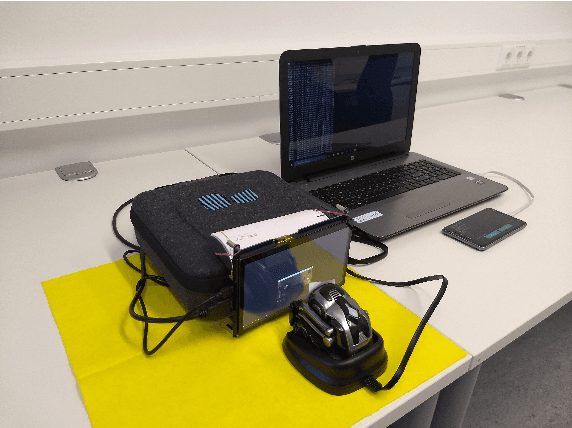
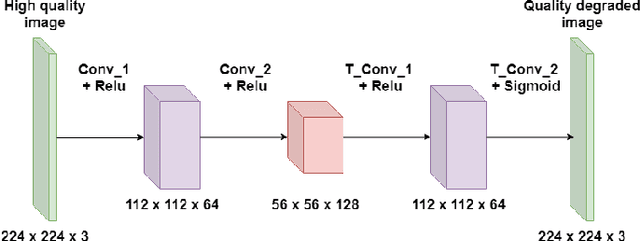
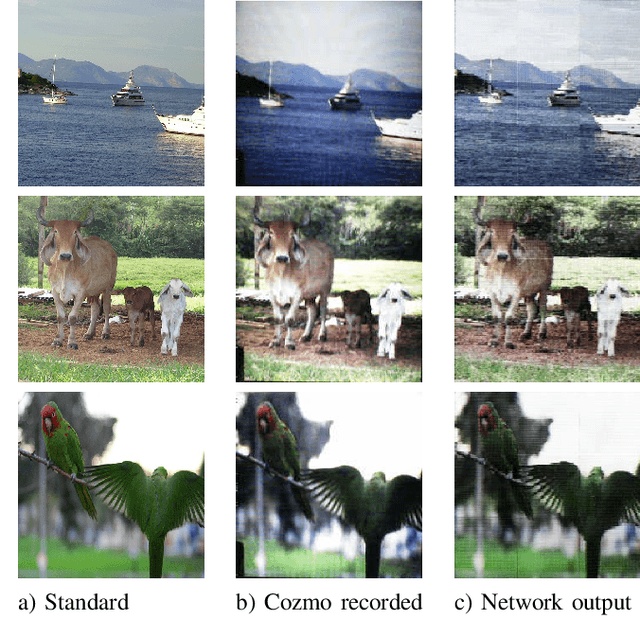
Deep Learning systems have proven to be extremely successful for image recognition tasks for which significant amounts of training data is available, e.g., on the famous ImageNet dataset. We demonstrate that for robotics applications with cheap camera equipment, the low image quality, however,influences the classification accuracy, and freely available databases cannot be exploited in a straight forward way to train classifiers to be used on a robot. As a solution we propose to train a network on degrading the quality images in order to mimic specific low quality imaging systems. Numerical experiments demonstrate that classification networks trained by using images produced by our quality degrading network along with the high quality images outperform classification networks trained only on high quality data when used on a real robot system, while being significantly easier to use than competing zero-shot domain adaptation techniques.