 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLayered Quantum Architecture Search for 3D Point Cloud Classification
Mar 20, 2026We introduce layered Quantum Architecture Search (layered-QAS), a strategy inspired by classical network morphism that designs Parametrised Quantum Circuit (PQC) architectures by progressively growing and adapting them. PQCs offer strong expressiveness with relatively few parameters, yet they lack standard architectural layers (e.g., convolution, attention) that encode inductive biases for a given learning task. To assess the effectiveness of our method, we focus on 3D point cloud classification as a challenging yet highly structured problem. Whereas prior work on this task has used PQCs only as feature extractors for classical classifiers, our approach uses the PQC as the main building block of the classification model. Simulations show that our layered-QAS mitigates barren plateau, outperforms quantum-adapted local and evolutionary QAS baselines, and achieves state-of-the-art results among PQC-based methods on the ModelNet dataset.
RAWDet-7: A Multi-Scenario Benchmark for Object Detection and Description on Quantized RAW Images
Feb 03, 2026Most vision models are trained on RGB images processed through ISP pipelines optimized for human perception, which can discard sensor-level information useful for machine reasoning. RAW images preserve unprocessed scene data, enabling models to leverage richer cues for both object detection and object description, capturing fine-grained details, spatial relationships, and contextual information often lost in processed images. To support research in this domain, we introduce RAWDet-7, a large-scale dataset of ~25k training and 7.6k test RAW images collected across diverse cameras, lighting conditions, and environments, densely annotated for seven object categories following MS-COCO and LVIS conventions. In addition, we provide object-level descriptions derived from the corresponding high-resolution sRGB images, facilitating the study of object-level information preservation under RAW image processing and low-bit quantization. The dataset allows evaluation under simulated 4-bit, 6-bit, and 8-bit quantization, reflecting realistic sensor constraints, and provides a benchmark for studying detection performance, description quality & detail, and generalization in low-bit RAW image processing. Dataset & code upon acceptance.
Quantum-enhanced Computer Vision: Going Beyond Classical Algorithms
Oct 08, 2025Quantum-enhanced Computer Vision (QeCV) is a new research field at the intersection of computer vision, optimisation theory, machine learning and quantum computing. It has high potential to transform how visual signals are processed and interpreted with the help of quantum computing that leverages quantum-mechanical effects in computations inaccessible to classical (i.e. non-quantum) computers. In scenarios where existing non-quantum methods cannot find a solution in a reasonable time or compute only approximate solutions, quantum computers can provide, among others, advantages in terms of better time scalability for multiple problem classes. Parametrised quantum circuits can also become, in the long term, a considerable alternative to classical neural networks in computer vision. However, specialised and fundamentally new algorithms must be developed to enable compatibility with quantum hardware and unveil the potential of quantum computational paradigms in computer vision. This survey contributes to the existing literature on QeCV with a holistic review of this research field. It is designed as a quantum computing reference for the computer vision community, targeting computer vision students, scientists and readers with related backgrounds who want to familiarise themselves with QeCV. We provide a comprehensive introduction to QeCV, its specifics, and methodologies for formulations compatible with quantum hardware and QeCV methods, leveraging two main quantum computational paradigms, i.e. gate-based quantum computing and quantum annealing. We elaborate on the operational principles of quantum computers and the available tools to access, program and simulate them in the context of QeCV. Finally, we review existing quantum computing tools and learning materials and discuss aspects related to publishing and reviewing QeCV papers, open challenges and potential social implications.
ONNX-Net: Towards Universal Representations and Instant Performance Prediction for Neural Architectures
Oct 06, 2025



Neural architecture search (NAS) automates the design process of high-performing architectures, but remains bottlenecked by expensive performance evaluation. Most existing studies that achieve faster evaluation are mostly tied to cell-based search spaces and graph encodings tailored to those individual search spaces, limiting their flexibility and scalability when applied to more expressive search spaces. In this work, we aim to close the gap of individual search space restrictions and search space dependent network representations. We present ONNX-Bench, a benchmark consisting of a collection of neural networks in a unified format based on ONNX files. ONNX-Bench includes all open-source NAS-bench-based neural networks, resulting in a total size of more than 600k {architecture, accuracy} pairs. This benchmark allows creating a shared neural network representation, ONNX-Net, able to represent any neural architecture using natural language descriptions acting as an input to a performance predictor. This text-based encoding can accommodate arbitrary layer types, operation parameters, and heterogeneous topologies, enabling a single surrogate to generalise across all neural architectures rather than being confined to cell-based search spaces. Experiments show strong zero-shot performance across disparate search spaces using only a small amount of pretraining samples, enabling the unprecedented ability to evaluate any neural network architecture instantly.
$γ$-Quant: Towards Learnable Quantization for Low-bit Pattern Recognition
Sep 26, 2025Most pattern recognition models are developed on pre-proce\-ssed data. In computer vision, for instance, RGB images processed through image signal processing (ISP) pipelines designed to cater to human perception are the most frequent input to image analysis networks. However, many modern vision tasks operate without a human in the loop, raising the question of whether such pre-processing is optimal for automated analysis. Similarly, human activity recognition (HAR) on body-worn sensor data commonly takes normalized floating-point data arising from a high-bit analog-to-digital converter (ADC) as an input, despite such an approach being highly inefficient in terms of data transmission, significantly affecting the battery life of wearable devices. In this work, we target low-bandwidth and energy-constrained settings where sensors are limited to low-bit-depth capture. We propose $\gamma$-Quant, i.e.~the task-specific learning of a non-linear quantization for pattern recognition. We exemplify our approach on raw-image object detection as well as HAR of wearable data, and demonstrate that raw data with a learnable quantization using as few as 4-bits can perform on par with the use of raw 12-bit data. All code to reproduce our experiments is publicly available via https://github.com/Mishalfatima/Gamma-Quant
Smooth Model Compression without Fine-Tuning
May 30, 2025Compressing and pruning large machine learning models has become a critical step towards their deployment in real-world applications. Standard pruning and compression techniques are typically designed without taking the structure of the network's weights into account, limiting their effectiveness. We explore the impact of smooth regularization on neural network training and model compression. By applying nuclear norm, first- and second-order derivative penalties of the weights during training, we encourage structured smoothness while preserving predictive performance on par with non-smooth models. We find that standard pruning methods often perform better when applied to these smooth models. Building on this observation, we apply a Singular-Value-Decomposition-based compression method that exploits the underlying smooth structure and approximates the model's weight tensors by smaller low-rank tensors. Our approach enables state-of-the-art compression without any fine-tuning - reaching up to $91\%$ accuracy on a smooth ResNet-18 on CIFAR-10 with $70\%$ fewer parameters.
DeepConvContext: A Multi-Scale Approach to Timeseries Classification in Human Activity Recognition
May 27, 2025Despite recognized limitations in modeling long-range temporal dependencies, Human Activity Recognition (HAR) has traditionally relied on a sliding window approach to segment labeled datasets. Deep learning models like the DeepConvLSTM typically classify each window independently, thereby restricting learnable temporal context to within-window information. To address this constraint, we propose DeepConvContext, a multi-scale time series classification framework for HAR. Drawing inspiration from the vision-based Temporal Action Localization community, DeepConvContext models both intra- and inter-window temporal patterns by processing sequences of time-ordered windows. Unlike recent HAR models that incorporate attention mechanisms, DeepConvContext relies solely on LSTMs -- with ablation studies demonstrating the superior performance of LSTMs over attention-based variants for modeling inertial sensor data. Across six widely-used HAR benchmarks, DeepConvContext achieves an average 10% improvement in F1-score over the classic DeepConvLSTM, with gains of up to 21%. Code to reproduce our experiments is publicly available via github.com/mariusbock/context_har.
Label Leakage in Federated Inertial-based Human Activity Recognition
May 27, 2025



While prior work has shown that Federated Learning updates can leak sensitive information, label reconstruction attacks, which aim to recover input labels from shared gradients, have not yet been examined in the context of Human Activity Recognition (HAR). Given the sensitive nature of activity labels, this study evaluates the effectiveness of state-of-the-art gradient-based label leakage attacks on HAR benchmark datasets. Our findings show that the number of activity classes, sampling strategy, and class imbalance are critical factors influencing the extent of label leakage, with reconstruction accuracies reaching up to 90% on two benchmark datasets, even for trained models. Moreover, we find that Local Differential Privacy techniques such as gradient noise and clipping offer only limited protection, as certain attacks still reliably infer both majority and minority class labels. We conclude by offering practical recommendations for the privacy-aware deployment of federated HAR systems and identify open challenges for future research. Code to reproduce our experiments is publicly available via github.com/mariusbock/leakage_har.
Direct Image Classification from Fourier Ptychographic Microscopy Measurements without Reconstruction
May 08, 2025The computational imaging technique of Fourier Ptychographic Microscopy (FPM) enables high-resolution imaging with a wide field of view and can serve as an extremely valuable tool, e.g. in the classification of cells in medical applications. However, reconstructing a high-resolution image from tens or even hundreds of measurements is computationally expensive, particularly for a wide field of view. Therefore, in this paper, we investigate the idea of classifying the image content in the FPM measurements directly without performing a reconstruction step first. We show that Convolutional Neural Networks (CNN) can extract meaningful information from measurement sequences, significantly outperforming the classification on a single band-limited image (up to 12 %) while being significantly more efficient than a reconstruction of a high-resolution image. Furthermore, we demonstrate that a learned multiplexing of several raw measurements allows maintaining the classification accuracy while reducing the amount of data (and consequently also the acquisition time) significantly.
Training Data Reconstruction: Privacy due to Uncertainty?
Dec 11, 2024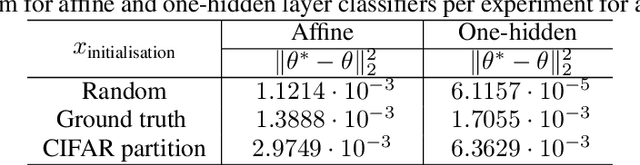


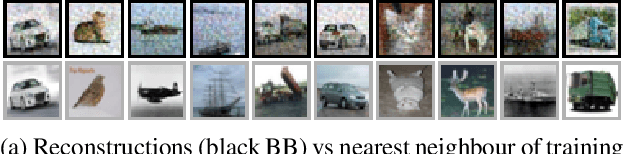
Being able to reconstruct training data from the parameters of a neural network is a major privacy concern. Previous works have shown that reconstructing training data, under certain circumstances, is possible. In this work, we analyse such reconstructions empirically and propose a new formulation of the reconstruction as a solution to a bilevel optimisation problem. We demonstrate that our formulation as well as previous approaches highly depend on the initialisation of the training images $x$ to reconstruct. In particular, we show that a random initialisation of $x$ can lead to reconstructions that resemble valid training samples while not being part of the actual training dataset. Thus, our experiments on affine and one-hidden layer networks suggest that when reconstructing natural images, yet an adversary cannot identify whether reconstructed images have indeed been part of the set of training samples.