 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-Rigid 3D Shape Correspondences: From Foundations to Open Challenges and Opportunities
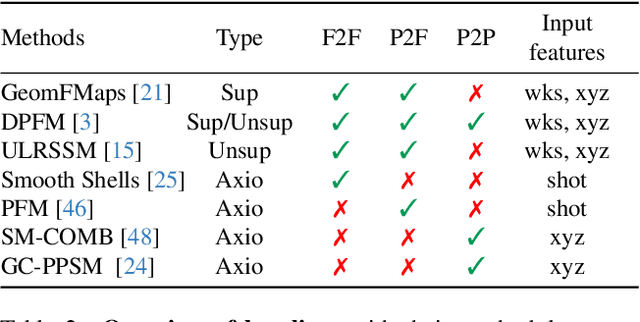
Apr 01, 2026Estimating correspondences between deformed shape instances is a long-standing problem in computer graphics; numerous applications, from texture transfer to statistical modelling, rely on recovering an accurate correspondence map. Many methods have thus been proposed to tackle this challenging problem from varying perspectives, depending on the downstream application. This state-of-the-art report is geared towards researchers, practitioners, and students seeking to understand recent trends and advances in the field. We categorise developments into three paradigms: spectral methods based on functional maps, combinatorial formulations that impose discrete constraints, and deformation-based methods that directly recover a global alignment. Each school of thought offers different advantages and disadvantages, which we discuss throughout the report. Meanwhile, we highlight the latest developments in each area and suggest new potential research directions. Finally, we provide an overview of emerging challenges and opportunities in this growing field, including the recent use of vision foundation models for zero-shot correspondence and the particularly challenging task of matching partial shapes.
Towards Improved Sentence Representations using Token Graphs
Mar 03, 2026Obtaining a single-vector representation from a Large Language Model's (LLM) token-level outputs is a critical step for nearly all sentence-level tasks. However, standard pooling methods like mean or max aggregation treat tokens as an independent set, discarding the rich relational structure captured by the model's self-attention layers and making them susceptible to signal dilution. To address this, we introduce GLOT, a lightweight, structure-aware pooling module that reframes pooling as relational learning followed by aggregation. Operating on the outputs of a frozen LLM, GLOT first constructs a latent token-similarity graph, then refines token representations with a graph neural network, and finally aggregates them using a readout layer. Experimentally, our approach is remarkably robust and efficient: on a diagnostic stress test where 90% of tokens are random distractors, GLOT maintains over 97% accuracy while baseline methods collapse. Furthermore, it is competitive with state-of-the-art techniques on benchmarks like GLUE and MTEB with 20x fewer trainable parameters and speeds up the training time by over 100x compared with parameter-efficient fine-tuning methods. Supported by a theoretical analysis of its expressive power, our work shows that learning over token graphs is a powerful paradigm for the efficient adaptation of frozen LLMs. Our code is published at https://github.com/ipsitmantri/GLOT.
MoAngelo: Motion-Aware Neural Surface Reconstruction for Dynamic Scenes
Sep 19, 2025Dynamic scene reconstruction from multi-view videos remains a fundamental challenge in computer vision. While recent neural surface reconstruction methods have achieved remarkable results in static 3D reconstruction, extending these approaches with comparable quality for dynamic scenes introduces significant computational and representational challenges. Existing dynamic methods focus on novel-view synthesis, therefore, their extracted meshes tend to be noisy. Even approaches aiming for geometric fidelity often result in too smooth meshes due to the ill-posedness of the problem. We present a novel framework for highly detailed dynamic reconstruction that extends the static 3D reconstruction method NeuralAngelo to work in dynamic settings. To that end, we start with a high-quality template scene reconstruction from the initial frame using NeuralAngelo, and then jointly optimize deformation fields that track the template and refine it based on the temporal sequence. This flexible template allows updating the geometry to include changes that cannot be modeled with the deformation field, for instance occluded parts or the changes in the topology. We show superior reconstruction accuracy in comparison to previous state-of-the-art methods on the ActorsHQ dataset.
Denoising Functional Maps: Diffusion Models for Shape Correspondence
Mar 03, 2025



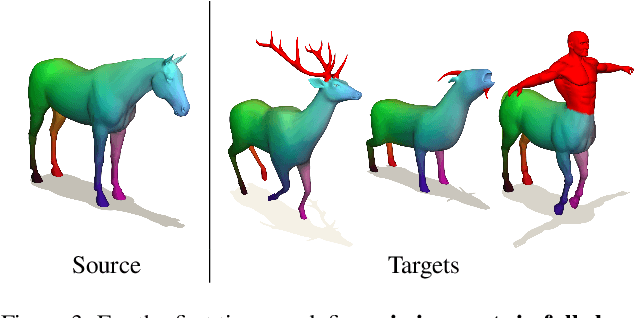
Estimating correspondences between pairs of deformable shapes remains a challenging problem. Despite substantial progress, existing methods lack broad generalization capabilities and require category-specific training data. To address these limitations, we propose a fundamentally new approach to shape correspondence based on denoising diffusion models. In our method, a diffusion model learns to directly predict the functional map, a low-dimensional representation of a point-wise map between shapes. We use a large dataset of synthetic human meshes for training and employ two steps to reduce the number of functional maps that need to be learned. First, the maps refer to a template rather than shape pairs. Second, the functional map is defined in a basis of eigenvectors of the Laplacian, which is not unique due to sign ambiguity. Therefore, we introduce an unsupervised approach to select a specific basis by correcting the signs of eigenvectors based on surface features. Our approach achieves competitive performance on standard human datasets, meshes with anisotropic connectivity, non-isometric humanoid shapes, as well as animals compared to existing descriptor-based and large-scale shape deformation methods.
Laplace-Beltrami Operator for Gaussian Splatting
Feb 24, 2025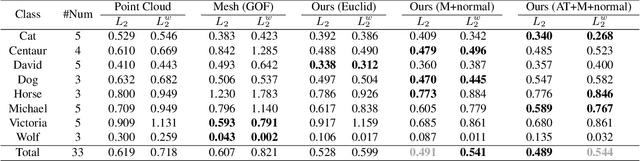
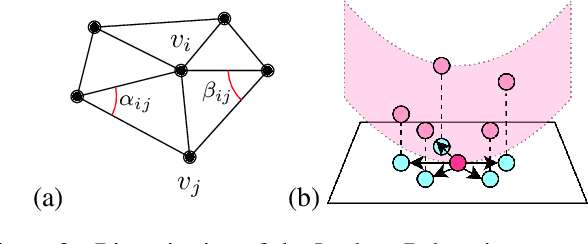
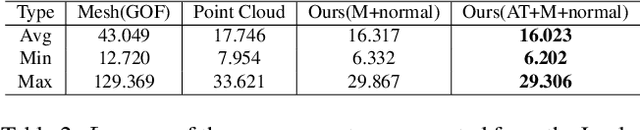
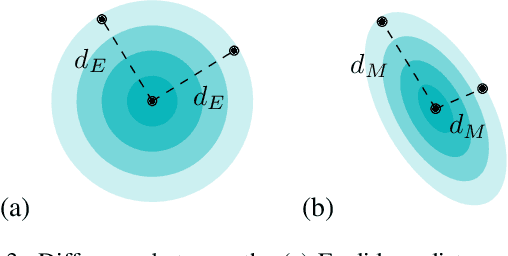
With the rising popularity of 3D Gaussian splatting and the expanse of applications from rendering to 3D reconstruction, there comes also a need for geometry processing applications directly on this new representation. While considering the centers of Gaussians as a point cloud or meshing them is an option that allows to apply existing algorithms, this might ignore information present in the data or be unnecessarily expensive. Additionally, Gaussian splatting tends to contain a large number of outliers which do not affect the rendering quality but need to be handled correctly in order not to produce noisy results in geometry processing applications. In this work, we propose a formulation to compute the Laplace-Beltrami operator, a widely used tool in geometry processing, directly on Gaussian splatting using the Mahalanobis distance. While conceptually similar to a point cloud Laplacian, our experiments show superior accuracy on the point clouds encoded in the Gaussian splatting centers and, additionally, the operator can be used to evaluate the quality of the output during optimization.
Beyond Complete Shapes: A quantitative Evaluation of 3D Shape Matching Algorithms
Nov 05, 2024

Finding correspondences between 3D shapes is an important and long-standing problem in computer vision, graphics and beyond. While approaches based on machine learning dominate modern 3D shape matching, almost all existing (learning-based) methods require that at least one of the involved shapes is complete. In contrast, the most challenging and arguably most practically relevant setting of matching partially observed shapes, is currently underexplored. One important factor is that existing datasets contain only a small number of shapes (typically below 100), which are unable to serve data-hungry machine learning approaches, particularly in the unsupervised regime. In addition, the type of partiality present in existing datasets is often artificial and far from realistic. To address these limitations and to encourage research on these relevant settings, we provide a generic and flexible framework for the procedural generation of challenging partial shape matching scenarios. Our framework allows for a virtually infinite generation of partial shape matching instances from a finite set of shapes with complete geometry. Further, we manually create cross-dataset correspondences between seven existing (complete geometry) shape matching datasets, leading to a total of 2543 shapes. Based on this, we propose several challenging partial benchmark settings, for which we evaluate respective state-of-the-art methods as baselines.
3D Shape Completion with Test-Time Training
Oct 24, 2024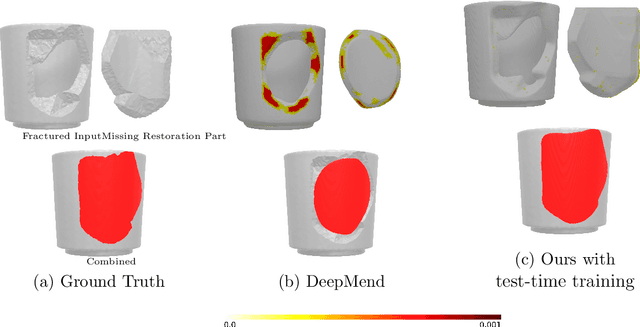
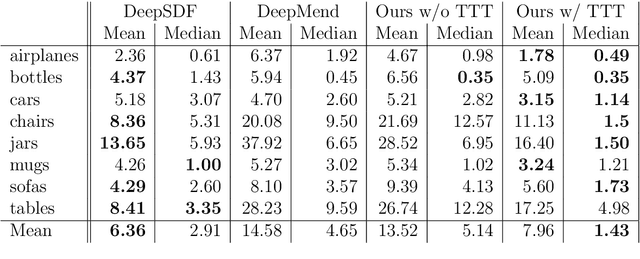
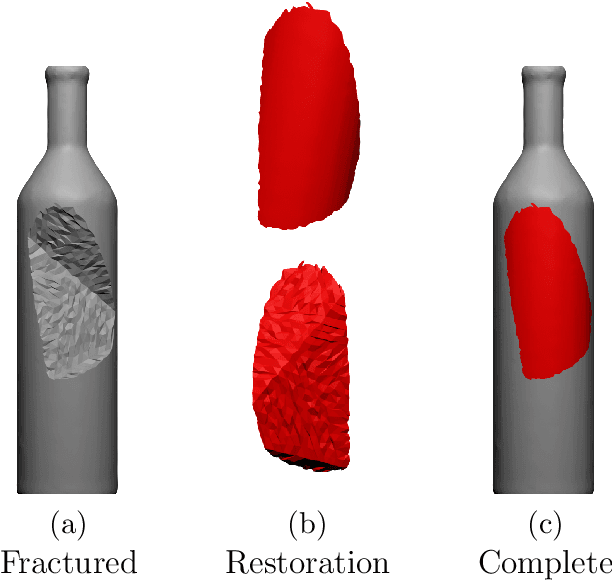
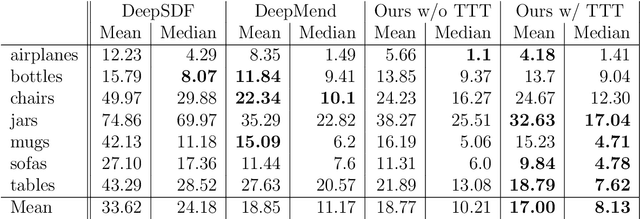
This work addresses the problem of \textit{shape completion}, i.e., the task of restoring incomplete shapes by predicting their missing parts. While previous works have often predicted the fractured and restored shape in one step, we approach the task by separately predicting the fractured and newly restored parts, but ensuring these predictions are interconnected. We use a decoder network motivated by related work on the prediction of signed distance functions (DeepSDF). In particular, our representation allows us to consider test-time-training, i.e., finetuning network parameters to match the given incomplete shape more accurately during inference. While previous works often have difficulties with artifacts around the fracture boundary, we demonstrate that our overfitting to the fractured parts leads to significant improvements in the restoration of eight different shape categories of the ShapeNet data set in terms of their chamfer distances.
Implicit-ARAP: Efficient Handle-Guided Deformation of High-Resolution Meshes and Neural Fields via Local Patch Meshing
May 21, 2024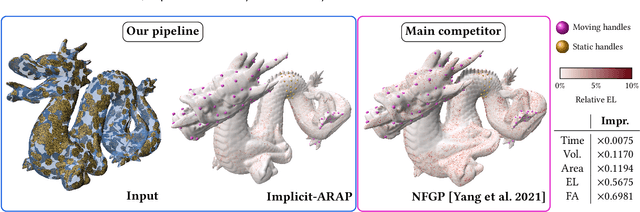


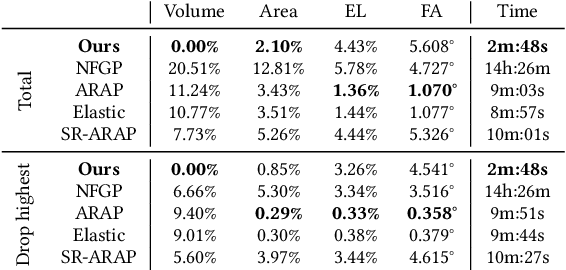
In this work, we present the local patch mesh representation for neural signed distance fields. This technique allows to discretize local regions of the level sets of an input SDF by projecting and deforming flat patch meshes onto the level set surface, using exclusively the SDF information and its gradient. Our analysis reveals this method to be more accurate than the standard marching cubes algorithm for approximating the implicit surface. Then, we apply this representation in the setting of handle-guided deformation: we introduce two distinct pipelines, which make use of 3D neural fields to compute As-Rigid-As-Possible deformations of both high-resolution meshes and neural fields under a given set of constraints. We run a comprehensive evaluation of our method and various baselines for neural field and mesh deformation which show both pipelines achieve impressive efficiency and notable improvements in terms of quality of results and robustness. With our novel pipeline, we introduce a scalable approach to solve a well-established geometry processing problem on high-resolution meshes, and pave the way for extending other geometric tasks to the domain of implicit surfaces via local patch meshing.
Hybrid Functional Maps for Crease-Aware Non-Isometric Shape Matching
Dec 06, 2023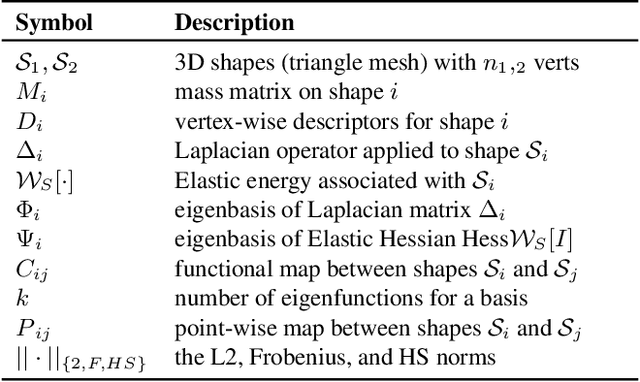
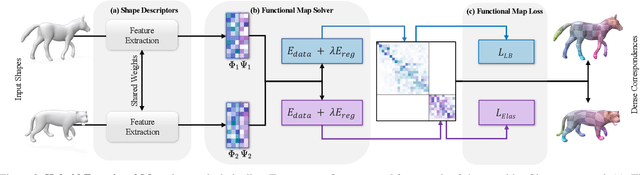
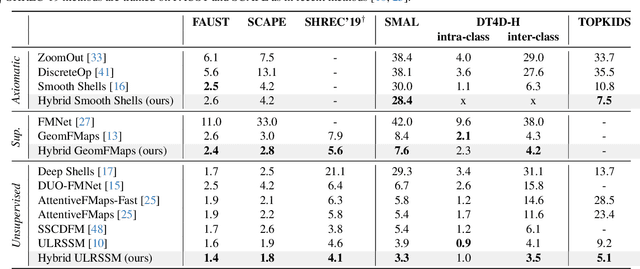
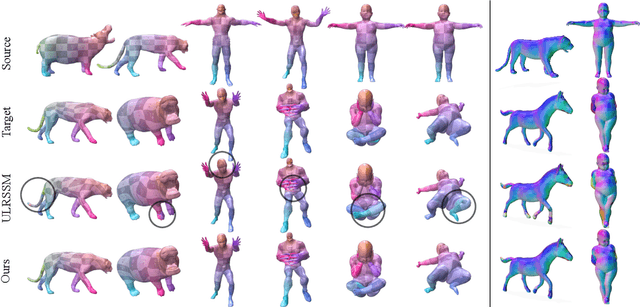
Non-isometric shape correspondence remains a fundamental challenge in computer vision. Traditional methods using Laplace-Beltrami operator (LBO) eigenmodes face limitations in characterizing high-frequency extrinsic shape changes like bending and creases. We propose a novel approach of combining the non-orthogonal extrinsic basis of eigenfunctions of the elastic thin-shell hessian with the intrinsic ones of the LBO, creating a hybrid spectral space in which we construct functional maps. To this end, we present a theoretical framework to effectively integrate non-orthogonal basis functions into descriptor- and learning-based functional map methods. Our approach can be incorporated easily into existing functional map pipelines across varying applications and is able to handle complex deformations beyond isometries. We show extensive evaluations across various supervised and unsupervised settings and demonstrate significant improvements. Notably, our approach achieves up to 15% better mean geodesic error for non-isometric correspondence settings and up to 45% improvement in scenarios with topological noise.
Kissing to Find a Match: Efficient Low-Rank Permutation Representation
Aug 25, 2023Permutation matrices play a key role in matching and assignment problems across the fields, especially in computer vision and robotics. However, memory for explicitly representing permutation matrices grows quadratically with the size of the problem, prohibiting large problem instances. In this work, we propose to tackle the curse of dimensionality of large permutation matrices by approximating them using low-rank matrix factorization, followed by a nonlinearity. To this end, we rely on the Kissing number theory to infer the minimal rank required for representing a permutation matrix of a given size, which is significantly smaller than the problem size. This leads to a drastic reduction in computation and memory costs, e.g., up to $3$ orders of magnitude less memory for a problem of size $n=20000$, represented using $8.4\times10^5$ elements in two small matrices instead of using a single huge matrix with $4\times 10^8$ elements. The proposed representation allows for accurate representations of large permutation matrices, which in turn enables handling large problems that would have been infeasible otherwise. We demonstrate the applicability and merits of the proposed approach through a series of experiments on a range of problems that involve predicting permutation matrices, from linear and quadratic assignment to shape matching problems.