 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-Rigid 3D Shape Correspondences: From Foundations to Open Challenges and Opportunities
Apr 01, 2026Estimating correspondences between deformed shape instances is a long-standing problem in computer graphics; numerous applications, from texture transfer to statistical modelling, rely on recovering an accurate correspondence map. Many methods have thus been proposed to tackle this challenging problem from varying perspectives, depending on the downstream application. This state-of-the-art report is geared towards researchers, practitioners, and students seeking to understand recent trends and advances in the field. We categorise developments into three paradigms: spectral methods based on functional maps, combinatorial formulations that impose discrete constraints, and deformation-based methods that directly recover a global alignment. Each school of thought offers different advantages and disadvantages, which we discuss throughout the report. Meanwhile, we highlight the latest developments in each area and suggest new potential research directions. Finally, we provide an overview of emerging challenges and opportunities in this growing field, including the recent use of vision foundation models for zero-shot correspondence and the particularly challenging task of matching partial shapes.
An Integer Linear Programming Approach to Geometrically Consistent Partial-Partial Shape Matching
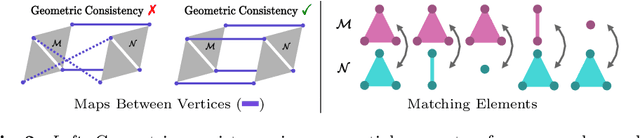
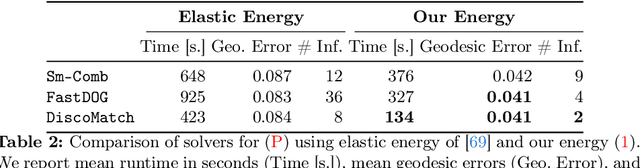
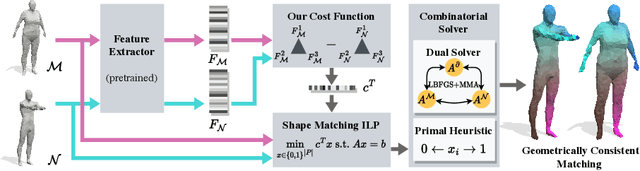
Feb 06, 2026The task of establishing correspondences between two 3D shapes is a long-standing challenge in computer vision. While numerous studies address full-full and partial-full 3D shape matching, only a limited number of works have explored the partial-partial setting, very likely due to its unique challenges: we must compute accurate correspondences while at the same time find the unknown overlapping region. Nevertheless, partial-partial 3D shape matching reflects the most realistic setting, as in many real-world cases, such as 3D scanning, shapes are only partially observable. In this work, we introduce the first integer linear programming approach specifically designed to address the distinctive challenges of partial-partial shape matching. Our method leverages geometric consistency as a strong prior, enabling both robust estimation of the overlapping region and computation of neighbourhood-preserving correspondences. We empirically demonstrate that our approach achieves high-quality matching results both in terms of matching error and smoothness. Moreover, we show that our method is more scalable than previous formalisms.
Symmetry Informative and Agnostic Feature Disentanglement for 3D Shapes
Jan 21, 2026Shape descriptors, i.e., per-vertex features of 3D meshes or point clouds, are fundamental to shape analysis. Historically, various handcrafted geometry-aware descriptors and feature refinement techniques have been proposed. Recently, several studies have initiated a new research direction by leveraging features from image foundation models to create semantics-aware descriptors, demonstrating advantages across tasks like shape matching, editing, and segmentation. Symmetry, another key concept in shape analysis, has also attracted increasing attention. Consequently, constructing symmetry-aware shape descriptors is a natural progression. Although the recent method $χ$ (Wang et al., 2025) successfully extracted symmetry-informative features from semantic-aware descriptors, its features are only one-dimensional, neglecting other valuable semantic information. Furthermore, the extracted symmetry-informative feature is usually noisy and yields small misclassified patches. To address these gaps, we propose a feature disentanglement approach which is simultaneously symmetry informative and symmetry agnostic. Further, we propose a feature refinement technique to improve the robustness of predicted symmetry informative features. Extensive experiments, including intrinsic symmetry detection, left/right classification, and shape matching, demonstrate the effectiveness of our proposed framework compared to various state-of-the-art methods, both qualitatively and quantitatively.
Fast Globally Optimal and Geometrically Consistent 3D Shape Matching
Apr 10, 2025Geometric consistency, i.e. the preservation of neighbourhoods, is a natural and strong prior in 3D shape matching. Geometrically consistent matchings are crucial for many downstream applications, such as texture transfer or statistical shape modelling. Yet, in practice, geometric consistency is often overlooked, or only achieved under severely limiting assumptions (e.g. a good initialisation). In this work, we propose a novel formalism for computing globally optimal and geometrically consistent matchings between 3D shapes which is scalable in practice. Our key idea is to represent the surface of the source shape as a collection of cyclic paths, which are then consistently matched to the target shape. Mathematically, we construct a hyper product graph (between source and target shape), and then cast 3D shape matching as a minimum-cost circulation flow problem in this hyper graph, which yields global geometrically consistent matchings between both shapes. We empirically show that our formalism is efficiently solvable and that it leads to high-quality results.
Partial-to-Partial Shape Matching with Geometric Consistency
Apr 18, 2024



Finding correspondences between 3D shapes is an important and long-standing problem in computer vision, graphics and beyond. A prominent challenge are partial-to-partial shape matching settings, which occur when the shapes to match are only observed incompletely (e.g. from 3D scanning). Although partial-to-partial matching is a highly relevant setting in practice, it is rarely explored. Our work bridges the gap between existing (rather artificial) 3D full shape matching and partial-to-partial real-world settings by exploiting geometric consistency as a strong constraint. We demonstrate that it is indeed possible to solve this challenging problem in a variety of settings. For the first time, we achieve geometric consistency for partial-to-partial matching, which is realized by a novel integer non-linear program formalism building on triangle product spaces, along with a new pruning algorithm based on linear integer programming. Further, we generate a new inter-class dataset for partial-to-partial shape-matching. We show that our method outperforms current SOTA methods on both an established intra-class dataset and our novel inter-class dataset.
Revisiting Map Relations for Unsupervised Non-Rigid Shape Matching
Oct 17, 2023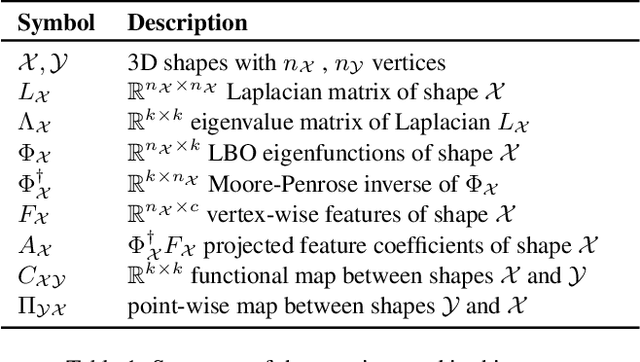
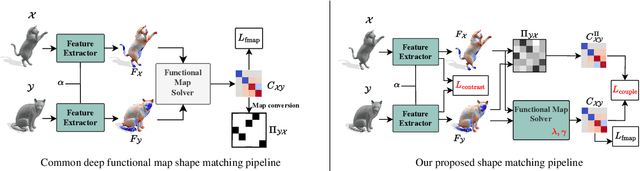
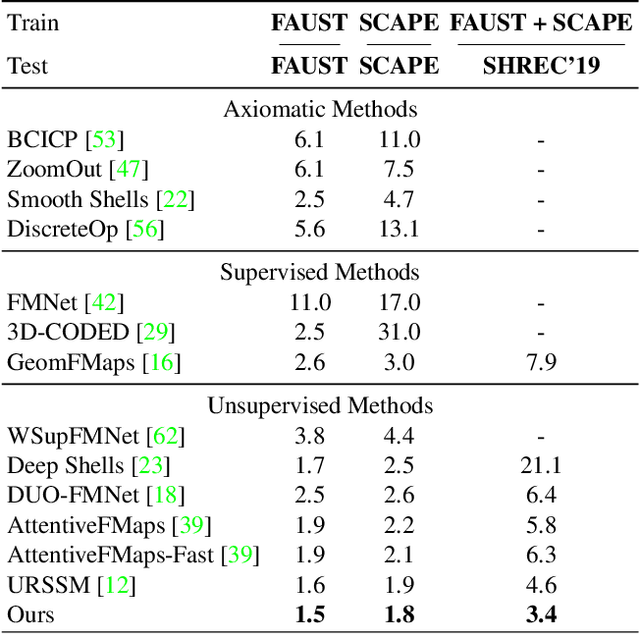
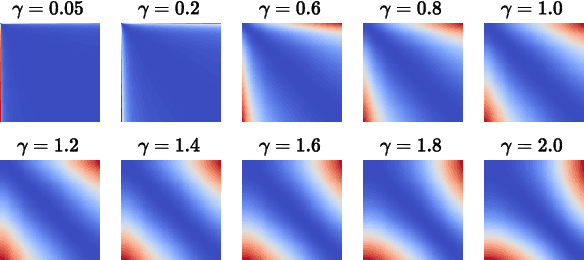
We propose a novel unsupervised learning approach for non-rigid 3D shape matching. Our approach improves upon recent state-of-the art deep functional map methods and can be applied to a broad range of different challenging scenarios. Previous deep functional map methods mainly focus on feature extraction and aim exclusively at obtaining more expressive features for functional map computation. However, the importance of the functional map computation itself is often neglected and the relationship between the functional map and point-wise map is underexplored. In this paper, we systematically investigate the coupling relationship between the functional map from the functional map solver and the point-wise map based on feature similarity. To this end, we propose a self-adaptive functional map solver to adjust the functional map regularisation for different shape matching scenarios, together with a vertex-wise contrastive loss to obtain more discriminative features. Using different challenging datasets (including non-isometry, topological noise and partiality), we demonstrate that our method substantially outperforms previous state-of-the-art methods.
Fast Discrete Optimisation for Geometrically Consistent 3D Shape Matching
Oct 12, 2023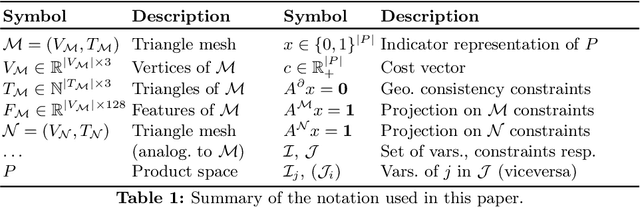
In this work we propose to combine the advantages of learning-based and combinatorial formalisms for 3D shape matching. While learning-based shape matching solutions lead to state-of-the-art matching performance, they do not ensure geometric consistency, so that obtained matchings are locally unsmooth. On the contrary, axiomatic methods allow to take geometric consistency into account by explicitly constraining the space of valid matchings. However, existing axiomatic formalisms are impractical since they do not scale to practically relevant problem sizes, or they require user input for the initialisation of non-convex optimisation problems. In this work we aim to close this gap by proposing a novel combinatorial solver that combines a unique set of favourable properties: our approach is (i) initialisation free, (ii) massively parallelisable powered by a quasi-Newton method, (iii) provides optimality gaps, and (iv) delivers decreased runtime and globally optimal results for many instances.
Geometrically Consistent Partial Shape Matching
Sep 10, 2023



Finding correspondences between 3D shapes is a crucial problem in computer vision and graphics, which is for example relevant for tasks like shape interpolation, pose transfer, or texture transfer. An often neglected but essential property of matchings is geometric consistency, which means that neighboring triangles in one shape are consistently matched to neighboring triangles in the other shape. Moreover, while in practice one often has only access to partial observations of a 3D shape (e.g. due to occlusion, or scanning artifacts), there do not exist any methods that directly address geometrically consistent partial shape matching. In this work we fill this gap by proposing to integrate state-of-the-art deep shape features into a novel integer linear programming partial shape matching formulation. Our optimization yields a globally optimal solution on low resolution shapes, which we then refine using a coarse-to-fine scheme. We show that our method can find more reliable results on partial shapes in comparison to existing geometrically consistent algorithms (for which one first has to fill missing parts with a dummy geometry). Moreover, our matchings are substantially smoother than learning-based state-of-the-art shape matching methods.
SIGMA: Scale-Invariant Global Sparse Shape Matching
Aug 16, 2023



We propose a novel mixed-integer programming (MIP) formulation for generating precise sparse correspondences for highly non-rigid shapes. To this end, we introduce a projected Laplace-Beltrami operator (PLBO) which combines intrinsic and extrinsic geometric information to measure the deformation quality induced by predicted correspondences. We integrate the PLBO, together with an orientation-aware regulariser, into a novel MIP formulation that can be solved to global optimality for many practical problems. In contrast to previous methods, our approach is provably invariant to rigid transformations and global scaling, initialisation-free, has optimality guarantees, and scales to high resolution meshes with (empirically observed) linear time. We show state-of-the-art results for sparse non-rigid matching on several challenging 3D datasets, including data with inconsistent meshing, as well as applications in mesh-to-point-cloud matching.
Unsupervised Learning of Robust Spectral Shape Matching
Apr 27, 2023We propose a novel learning-based approach for robust 3D shape matching. Our method builds upon deep functional maps and can be trained in a fully unsupervised manner. Previous deep functional map methods mainly focus on predicting optimised functional maps alone, and then rely on off-the-shelf post-processing to obtain accurate point-wise maps during inference. However, this two-stage procedure for obtaining point-wise maps often yields sub-optimal performance. In contrast, building upon recent insights about the relation between functional maps and point-wise maps, we propose a novel unsupervised loss to couple the functional maps and point-wise maps, and thereby directly obtain point-wise maps without any post-processing. Our approach obtains accurate correspondences not only for near-isometric shapes, but also for more challenging non-isometric shapes and partial shapes, as well as shapes with different discretisation or topological noise. Using a total of nine diverse datasets, we extensively evaluate the performance and demonstrate that our method substantially outperforms previous state-of-the-art methods, even compared to recent supervised methods. Our code is available at https://github.com/dongliangcao/Unsupervised-Learning-of-Robust-Spectral-Shape-Matching.