 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Neural Networks Are Not Continuous Across Graph Resolutions
May 29, 2026We show that contrary to conventional wisdom in the community, graph neural networks (GNNs) are not continuous with respect to all natural modes of graph convergence. As a result, GNNs may generate substantially different latent representations for graphs that are very similar. In particular they assign vastly different latent embeddings to graphs that represent the same underlying object at different resolution scales. We trace this failure of continuity back to a structural obstruction arising from commonly used information-propagation schemes. Building on this insight we then derive a principled modification to standard GNN architectures which equips models with continuity across scales. The proposed modification enables consistent integration of distinct resolutions and reliable generalization between them. We systematically validate our theoretical findings in a wide range of numerical experiments.
ArchAgent: Agentic AI-driven Computer Architecture Discovery
Feb 25, 2026Agile hardware design flows are a critically needed force multiplier to meet the exploding demand for compute. Recently, agentic generative AI systems have demonstrated significant advances in algorithm design, improving code efficiency, and enabling discovery across scientific domains. Bridging these worlds, we present ArchAgent, an automated computer architecture discovery system built on AlphaEvolve. We show ArchAgent's ability to automatically design/implement state-of-the-art (SoTA) cache replacement policies (architecting new mechanisms/logic, not only changing parameters), broadly within the confines of an established cache replacement policy design competition. In two days without human intervention, ArchAgent generated a policy achieving a 5.3% IPC speedup improvement over the prior SoTA on public multi-core Google Workload Traces. On the heavily-explored single-core SPEC06 workloads, it generated a policy in just 18 days showing a 0.9% IPC speedup improvement over the existing SoTA (a similar "winning margin" as reported by the existing SoTA). ArchAgent achieved these gains 3-5x faster than prior human-developed SoTA policies. Agentic flows also enable "post-silicon hyperspecialization" where agents tune runtime-configurable parameters exposed in hardware policies to further align the policies with a specific workload (mix). Exploiting this, we demonstrate a 2.4% IPC speedup improvement over prior SoTA on SPEC06 workloads. Finally, we outline broader implications for computer architecture research in the era of agentic AI. For example, we demonstrate the phenomenon of "simulator escapes", where the agentic AI flow discovered and exploited a loophole in a popular microarchitectural simulator - a consequence of the fact that these research tools were designed for a (now past) world where they were exclusively operated by humans acting in good-faith.
AlphaEvolve: A coding agent for scientific and algorithmic discovery
Jun 16, 2025In this white paper, we present AlphaEvolve, an evolutionary coding agent that substantially enhances capabilities of state-of-the-art LLMs on highly challenging tasks such as tackling open scientific problems or optimizing critical pieces of computational infrastructure. AlphaEvolve orchestrates an autonomous pipeline of LLMs, whose task is to improve an algorithm by making direct changes to the code. Using an evolutionary approach, continuously receiving feedback from one or more evaluators, AlphaEvolve iteratively improves the algorithm, potentially leading to new scientific and practical discoveries. We demonstrate the broad applicability of this approach by applying it to a number of important computational problems. When applied to optimizing critical components of large-scale computational stacks at Google, AlphaEvolve developed a more efficient scheduling algorithm for data centers, found a functionally equivalent simplification in the circuit design of hardware accelerators, and accelerated the training of the LLM underpinning AlphaEvolve itself. Furthermore, AlphaEvolve discovered novel, provably correct algorithms that surpass state-of-the-art solutions on a spectrum of problems in mathematics and computer science, significantly expanding the scope of prior automated discovery methods (Romera-Paredes et al., 2023). Notably, AlphaEvolve developed a search algorithm that found a procedure to multiply two $4 \times 4$ complex-valued matrices using $48$ scalar multiplications; offering the first improvement, after 56 years, over Strassen's algorithm in this setting. We believe AlphaEvolve and coding agents like it can have a significant impact in improving solutions of problems across many areas of science and computation.
Partial-to-Partial Shape Matching with Geometric Consistency
Apr 18, 2024



Finding correspondences between 3D shapes is an important and long-standing problem in computer vision, graphics and beyond. A prominent challenge are partial-to-partial shape matching settings, which occur when the shapes to match are only observed incompletely (e.g. from 3D scanning). Although partial-to-partial matching is a highly relevant setting in practice, it is rarely explored. Our work bridges the gap between existing (rather artificial) 3D full shape matching and partial-to-partial real-world settings by exploiting geometric consistency as a strong constraint. We demonstrate that it is indeed possible to solve this challenging problem in a variety of settings. For the first time, we achieve geometric consistency for partial-to-partial matching, which is realized by a novel integer non-linear program formalism building on triangle product spaces, along with a new pruning algorithm based on linear integer programming. Further, we generate a new inter-class dataset for partial-to-partial shape-matching. We show that our method outperforms current SOTA methods on both an established intra-class dataset and our novel inter-class dataset.
SatSynth: Augmenting Image-Mask Pairs through Diffusion Models for Aerial Semantic Segmentation
Mar 25, 2024
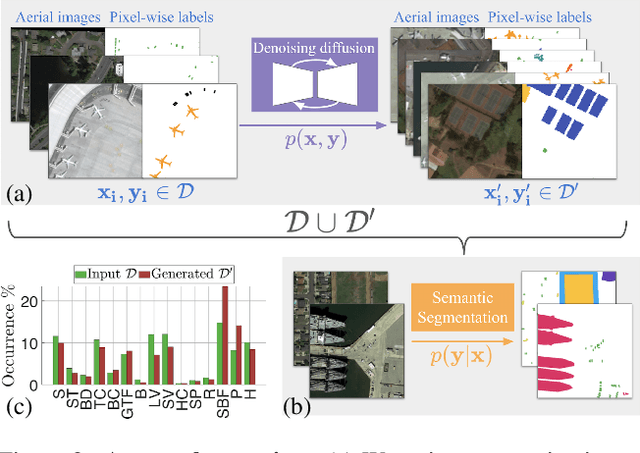

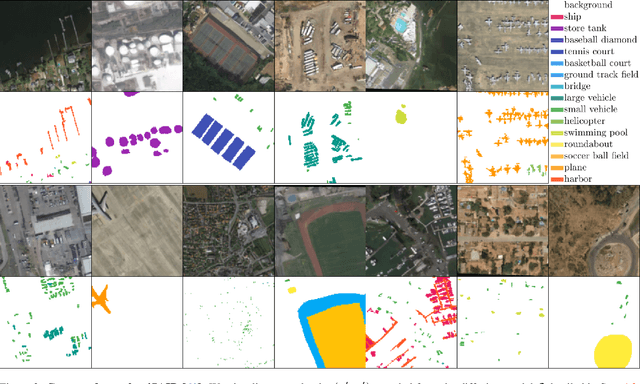
In recent years, semantic segmentation has become a pivotal tool in processing and interpreting satellite imagery. Yet, a prevalent limitation of supervised learning techniques remains the need for extensive manual annotations by experts. In this work, we explore the potential of generative image diffusion to address the scarcity of annotated data in earth observation tasks. The main idea is to learn the joint data manifold of images and labels, leveraging recent advancements in denoising diffusion probabilistic models. To the best of our knowledge, we are the first to generate both images and corresponding masks for satellite segmentation. We find that the obtained pairs not only display high quality in fine-scale features but also ensure a wide sampling diversity. Both aspects are crucial for earth observation data, where semantic classes can vary severely in scale and occurrence frequency. We employ the novel data instances for downstream segmentation, as a form of data augmentation. In our experiments, we provide comparisons to prior works based on discriminative diffusion models or GANs. We demonstrate that integrating generated samples yields significant quantitative improvements for satellite semantic segmentation -- both compared to baselines and when training only on the original data.
Spectral Meets Spatial: Harmonising 3D Shape Matching and Interpolation
Mar 13, 2024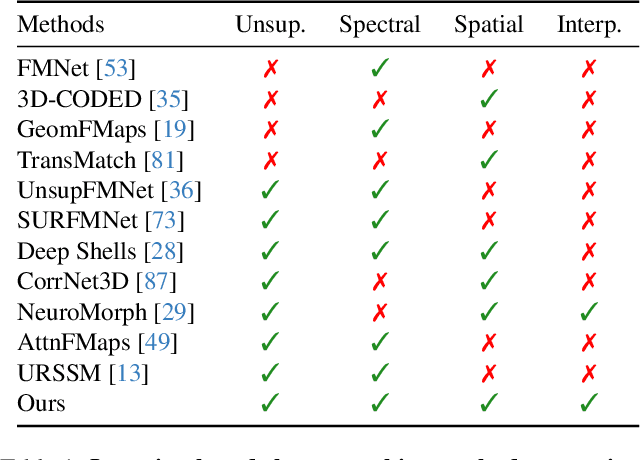
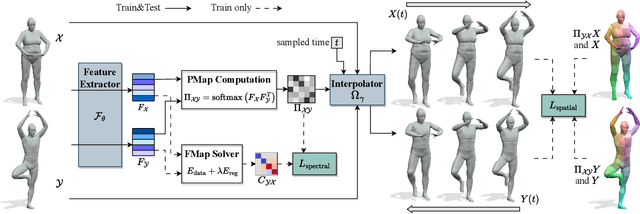
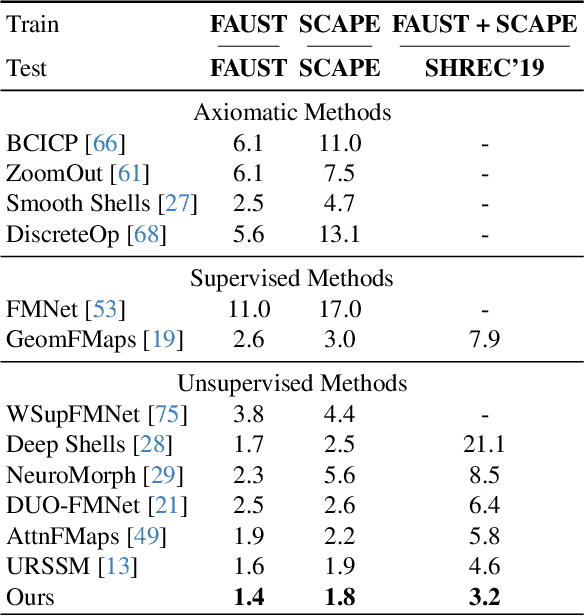
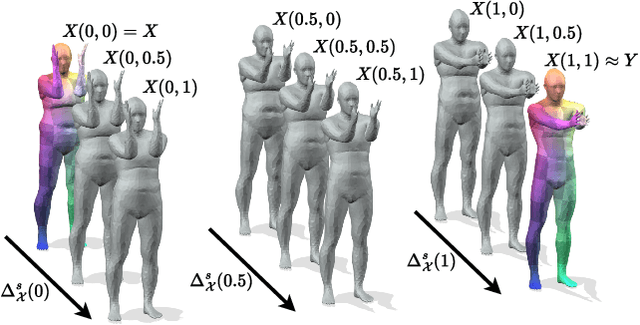
Although 3D shape matching and interpolation are highly interrelated, they are often studied separately and applied sequentially to relate different 3D shapes, thus resulting in sub-optimal performance. In this work we present a unified framework to predict both point-wise correspondences and shape interpolation between 3D shapes. To this end, we combine the deep functional map framework with classical surface deformation models to map shapes in both spectral and spatial domains. On the one hand, by incorporating spatial maps, our method obtains more accurate and smooth point-wise correspondences compared to previous functional map methods for shape matching. On the other hand, by introducing spectral maps, our method gets rid of commonly used but computationally expensive geodesic distance constraints that are only valid for near-isometric shape deformations. Furthermore, we propose a novel test-time adaptation scheme to capture both pose-dominant and shape-dominant deformations. Using different challenging datasets, we demonstrate that our method outperforms previous state-of-the-art methods for both shape matching and interpolation, even compared to supervised approaches.
ResolvNet: A Graph Convolutional Network with multi-scale Consistency
Sep 30, 2023



It is by now a well known fact in the graph learning community that the presence of bottlenecks severely limits the ability of graph neural networks to propagate information over long distances. What so far has not been appreciated is that, counter-intuitively, also the presence of strongly connected sub-graphs may severely restrict information flow in common architectures. Motivated by this observation, we introduce the concept of multi-scale consistency. At the node level this concept refers to the retention of a connected propagation graph even if connectivity varies over a given graph. At the graph-level, multi-scale consistency refers to the fact that distinct graphs describing the same object at different resolutions should be assigned similar feature vectors. As we show, both properties are not satisfied by poular graph neural network architectures. To remedy these shortcomings, we introduce ResolvNet, a flexible graph neural network based on the mathematical concept of resolvents. We rigorously establish its multi-scale consistency theoretically and verify it in extensive experiments on real world data: Here networks based on this ResolvNet architecture prove expressive; out-performing baselines significantly on many tasks; in- and outside the multi-scale setting.
Geometrically Consistent Partial Shape Matching
Sep 10, 2023



Finding correspondences between 3D shapes is a crucial problem in computer vision and graphics, which is for example relevant for tasks like shape interpolation, pose transfer, or texture transfer. An often neglected but essential property of matchings is geometric consistency, which means that neighboring triangles in one shape are consistently matched to neighboring triangles in the other shape. Moreover, while in practice one often has only access to partial observations of a 3D shape (e.g. due to occlusion, or scanning artifacts), there do not exist any methods that directly address geometrically consistent partial shape matching. In this work we fill this gap by proposing to integrate state-of-the-art deep shape features into a novel integer linear programming partial shape matching formulation. Our optimization yields a globally optimal solution on low resolution shapes, which we then refine using a coarse-to-fine scheme. We show that our method can find more reliable results on partial shapes in comparison to existing geometrically consistent algorithms (for which one first has to fill missing parts with a dummy geometry). Moreover, our matchings are substantially smoother than learning-based state-of-the-art shape matching methods.
SIGMA: Scale-Invariant Global Sparse Shape Matching
Aug 16, 2023



We propose a novel mixed-integer programming (MIP) formulation for generating precise sparse correspondences for highly non-rigid shapes. To this end, we introduce a projected Laplace-Beltrami operator (PLBO) which combines intrinsic and extrinsic geometric information to measure the deformation quality induced by predicted correspondences. We integrate the PLBO, together with an orientation-aware regulariser, into a novel MIP formulation that can be solved to global optimality for many practical problems. In contrast to previous methods, our approach is provably invariant to rigid transformations and global scaling, initialisation-free, has optimality guarantees, and scales to high resolution meshes with (empirically observed) linear time. We show state-of-the-art results for sparse non-rigid matching on several challenging 3D datasets, including data with inconsistent meshing, as well as applications in mesh-to-point-cloud matching.
G-MSM: Unsupervised Multi-Shape Matching with Graph-based Affinity Priors
Dec 06, 2022We present G-MSM (Graph-based Multi-Shape Matching), a novel unsupervised learning approach for non-rigid shape correspondence. Rather than treating a collection of input poses as an unordered set of samples, we explicitly model the underlying shape data manifold. To this end, we propose an adaptive multi-shape matching architecture that constructs an affinity graph on a given set of training shapes in a self-supervised manner. The key idea is to combine putative, pairwise correspondences by propagating maps along shortest paths in the underlying shape graph. During training, we enforce cycle-consistency between such optimal paths and the pairwise matches which enables our model to learn topology-aware shape priors. We explore different classes of shape graphs and recover specific settings, like template-based matching (star graph) or learnable ranking/sorting (TSP graph), as special cases in our framework. Finally, we demonstrate state-of-the-art performance on several recent shape correspondence benchmarks, including real-world 3D scan meshes with topological noise and challenging inter-class pairs.