 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhanced Drift-Aware Computer Vision Architecture for Autonomous Driving
Aug 25, 2025The use of computer vision in automotive is a trending research in which safety and security are a primary concern. In particular, for autonomous driving, preventing road accidents requires highly accurate object detection under diverse conditions. To address this issue, recently the International Organization for Standardization (ISO) released the 8800 norm, providing structured frameworks for managing associated AI relevant risks. However, challenging scenarios such as adverse weather or low lighting often introduce data drift, leading to degraded model performance and potential safety violations. In this work, we present a novel hybrid computer vision architecture trained with thousands of synthetic image data from the road environment to improve robustness in unseen drifted environments. Our dual mode framework utilized YOLO version 8 for swift detection and incorporated a five-layer CNN for verification. The system functioned in sequence and improved the detection accuracy by more than 90\% when tested with drift-augmented road images. The focus was to demonstrate how such a hybrid model can provide better road safety when working together in a hybrid structure.
Integration of Computer Vision with Adaptive Control for Autonomous Driving Using ADORE
Aug 25, 2025Ensuring safety in autonomous driving requires a seamless integration of perception and decision making under uncertain conditions. Although computer vision (CV) models such as YOLO achieve high accuracy in detecting traffic signs and obstacles, their performance degrades in drift scenarios caused by weather variations or unseen objects. This work presents a simulated autonomous driving system that combines a context aware CV model with adaptive control using the ADORE framework. The CARLA simulator was integrated with ADORE via the ROS bridge, allowing real-time communication between perception, decision, and control modules. A simulated test case was designed in both clear and drift weather conditions to demonstrate the robust detection performance of the perception model while ADORE successfully adapted vehicle behavior to speed limits and obstacles with low response latency. The findings highlight the potential of coupling deep learning-based perception with rule-based adaptive decision making to improve automotive safety critical system.
LLM-Assisted Knowledge Graph Completion for Curriculum and Domain Modelling in Personalized Higher Education Recommendations
Jan 21, 2025While learning personalization offers great potential for learners, modern practices in higher education require a deeper consideration of domain models and learning contexts, to develop effective personalization algorithms. This paper introduces an innovative approach to higher education curriculum modelling that utilizes large language models (LLMs) for knowledge graph (KG) completion, with the goal of creating personalized learning-path recommendations. Our research focuses on modelling university subjects and linking their topics to corresponding domain models, enabling the integration of learning modules from different faculties and institutions in the student's learning path. Central to our approach is a collaborative process, where LLMs assist human experts in extracting high-quality, fine-grained topics from lecture materials. We develop a domain, curriculum, and user models for university modules and stakeholders. We implement this model to create the KG from two study modules: Embedded Systems and Development of Embedded Systems Using FPGA. The resulting KG structures the curriculum and links it to the domain models. We evaluate our approach through qualitative expert feedback and quantitative graph quality metrics. Domain experts validated the relevance and accuracy of the model, while the graph quality metrics measured the structural properties of our KG. Our results show that the LLM-assisted graph completion approach enhances the ability to connect related courses across disciplines to personalize the learning experience. Expert feedback also showed high acceptance of the proposed collaborative approach for concept extraction and classification.
A Computer Vision Approach for Autonomous Cars to Drive Safe at Construction Zone
Sep 24, 2024To build a smarter and safer city, a secure, efficient, and sustainable transportation system is a key requirement. The autonomous driving system (ADS) plays an important role in the development of smart transportation and is considered one of the major challenges facing the automotive sector in recent decades. A car equipped with an autonomous driving system (ADS) comes with various cutting-edge functionalities such as adaptive cruise control, collision alerts, automated parking, and more. A primary area of research within ADAS involves identifying road obstacles in construction zones regardless of the driving environment. This paper presents an innovative and highly accurate road obstacle detection model utilizing computer vision technology that can be activated in construction zones and functions under diverse drift conditions, ultimately contributing to build a safer road transportation system. The model developed with the YOLO framework achieved a mean average precision exceeding 94\% and demonstrated an inference time of 1.6 milliseconds on the validation dataset, underscoring the robustness of the methodology applied to mitigate hazards and risks for autonomous vehicles.
A Simple Domain Shifting Networkfor Generating Low Quality Images
Jun 30, 2020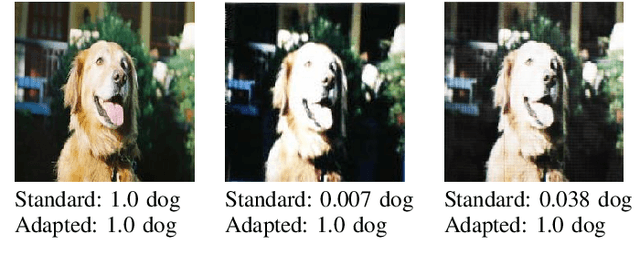
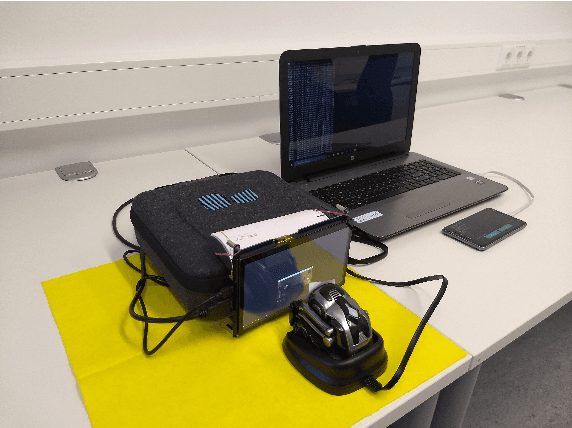
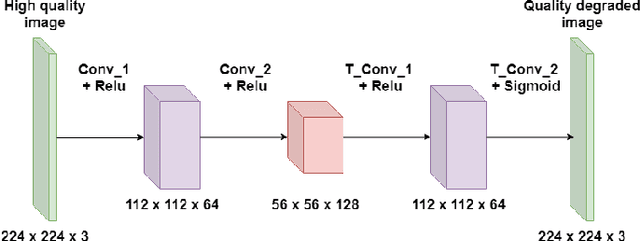
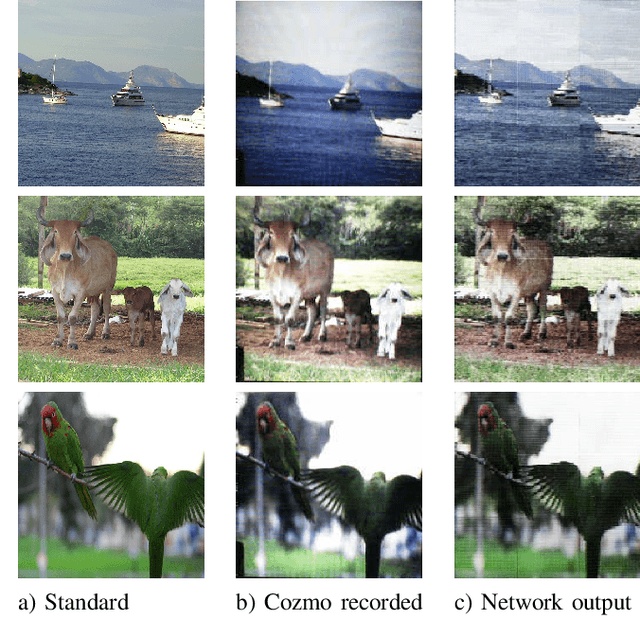
Deep Learning systems have proven to be extremely successful for image recognition tasks for which significant amounts of training data is available, e.g., on the famous ImageNet dataset. We demonstrate that for robotics applications with cheap camera equipment, the low image quality, however,influences the classification accuracy, and freely available databases cannot be exploited in a straight forward way to train classifiers to be used on a robot. As a solution we propose to train a network on degrading the quality images in order to mimic specific low quality imaging systems. Numerical experiments demonstrate that classification networks trained by using images produced by our quality degrading network along with the high quality images outperform classification networks trained only on high quality data when used on a real robot system, while being significantly easier to use than competing zero-shot domain adaptation techniques.