 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeV3LMA: Visual 3D-enhanced Language Model for Autonomous Driving
Apr 30, 2025Large Vision Language Models (LVLMs) have shown strong capabilities in understanding and analyzing visual scenes across various domains. However, in the context of autonomous driving, their limited comprehension of 3D environments restricts their effectiveness in achieving a complete and safe understanding of dynamic surroundings. To address this, we introduce V3LMA, a novel approach that enhances 3D scene understanding by integrating Large Language Models (LLMs) with LVLMs. V3LMA leverages textual descriptions generated from object detections and video inputs, significantly boosting performance without requiring fine-tuning. Through a dedicated preprocessing pipeline that extracts 3D object data, our method improves situational awareness and decision-making in complex traffic scenarios, achieving a score of 0.56 on the LingoQA benchmark. We further explore different fusion strategies and token combinations with the goal of advancing the interpretation of traffic scenes, ultimately enabling safer autonomous driving systems.
Scenario Understanding of Traffic Scenes Through Large Visual Language Models
Jan 28, 2025Deep learning models for autonomous driving, encompassing perception, planning, and control, depend on vast datasets to achieve their high performance. However, their generalization often suffers due to domain-specific data distributions, making an effective scene-based categorization of samples necessary to improve their reliability across diverse domains. Manual captioning, though valuable, is both labor-intensive and time-consuming, creating a bottleneck in the data annotation process. Large Visual Language Models (LVLMs) present a compelling solution by automating image analysis and categorization through contextual queries, often without requiring retraining for new categories. In this study, we evaluate the capabilities of LVLMs, including GPT-4 and LLaVA, to understand and classify urban traffic scenes on both an in-house dataset and the BDD100K. We propose a scalable captioning pipeline that integrates state-of-the-art models, enabling a flexible deployment on new datasets. Our analysis, combining quantitative metrics with qualitative insights, demonstrates the effectiveness of LVLMs to understand urban traffic scenarios and highlights their potential as an efficient tool for data-driven advancements in autonomous driving.
Snapshot: Towards Application-centered Models for Pedestrian Trajectory Prediction in Urban Traffic Environments
Sep 03, 2024



This paper explores pedestrian trajectory prediction in urban traffic while focusing on both model accuracy and real-world applicability. While promising approaches exist, they are often not publicly available, revolve around pedestrian datasets excluding traffic-related information, or resemble architectures that are either not real-time capable or robust. To address these limitations, we first introduce a dedicated benchmark based on Argoverse 2, specifically targeting pedestrians in urban settings. Following this, we present Snapshot, a modular, feed-forward neural network that outperforms the current state of the art while utilizing significantly less information. Despite its agent-centric encoding scheme, Snapshot demonstrates scalability, real-time performance, and robustness to varying motion histories. Moreover, by integrating Snapshot into a modular autonomous driving software stack, we showcase its real-world applicability
EDGAR: An Autonomous Driving Research Platform -- From Feature Development to Real-World Application
Sep 27, 2023
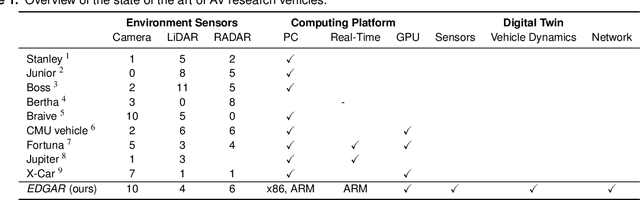

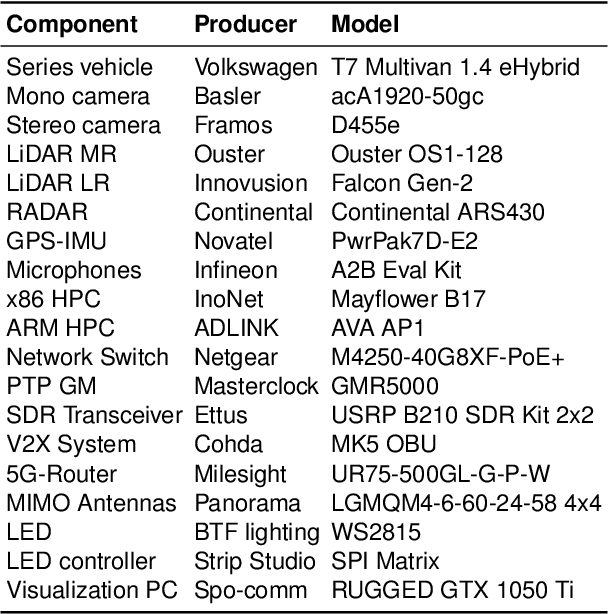
While current research and development of autonomous driving primarily focuses on developing new features and algorithms, the transfer from isolated software components into an entire software stack has been covered sparsely. Besides that, due to the complexity of autonomous software stacks and public road traffic, the optimal validation of entire stacks is an open research problem. Our paper targets these two aspects. We present our autonomous research vehicle EDGAR and its digital twin, a detailed virtual duplication of the vehicle. While the vehicle's setup is closely related to the state of the art, its virtual duplication is a valuable contribution as it is crucial for a consistent validation process from simulation to real-world tests. In addition, different development teams can work with the same model, making integration and testing of the software stacks much easier, significantly accelerating the development process. The real and virtual vehicles are embedded in a comprehensive development environment, which is also introduced. All parameters of the digital twin are provided open-source at https://github.com/TUMFTM/edgar_digital_twin.
Evaluating Pedestrian Trajectory Prediction Methods for the Application in Autonomous Driving
Aug 09, 2023



In this paper, the state of the art in the field of pedestrian trajectory prediction is evaluated alongside the constant velocity model (CVM) with respect to its applicability in autonomous vehicles. The evaluation is conducted on the widely-used ETH/UCY dataset where the Average Displacement Error (ADE) and the Final Displacement Error (FDE) are reported. To align with requirements in real-world applications, modifications are made to the input features of the initially proposed models. An ablation study is conducted to examine the influence of the observed motion history on the prediction performance, thereby establishing a better understanding of its impact. Additionally, the inference time of each model is measured to evaluate the scalability of each model when confronted with varying amounts of agents. The results demonstrate that simple models remain competitive when generating single trajectories, and certain features commonly thought of as useful have little impact on the overall performance across different architectures. Based on these findings, recommendations are proposed to guide the future development of trajectory prediction algorithms.