 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTo New Beginnings: A Survey of Unified Perception in Autonomous Vehicle Software
Aug 28, 2025Autonomous vehicle perception typically relies on modular pipelines that decompose the task into detection, tracking, and prediction. While interpretable, these pipelines suffer from error accumulation and limited inter-task synergy. Unified perception has emerged as a promising paradigm that integrates these sub-tasks within a shared architecture, potentially improving robustness, contextual reasoning, and efficiency while retaining interpretable outputs. In this survey, we provide a comprehensive overview of unified perception, introducing a holistic and systemic taxonomy that categorizes methods along task integration, tracking formulation, and representation flow. We define three paradigms -Early, Late, and Full Unified Perception- and systematically review existing methods, their architectures, training strategies, datasets used, and open-source availability, while highlighting future research directions. This work establishes the first comprehensive framework for understanding and advancing unified perception, consolidates fragmented efforts, and guides future research toward more robust, generalizable, and interpretable perception.
VESPA: Towards un(Human)supervised Open-World Pointcloud Labeling for Autonomous Driving
Jul 27, 2025Data collection for autonomous driving is rapidly accelerating, but manual annotation, especially for 3D labels, remains a major bottleneck due to its high cost and labor intensity. Autolabeling has emerged as a scalable alternative, allowing the generation of labels for point clouds with minimal human intervention. While LiDAR-based autolabeling methods leverage geometric information, they struggle with inherent limitations of lidar data, such as sparsity, occlusions, and incomplete object observations. Furthermore, these methods typically operate in a class-agnostic manner, offering limited semantic granularity. To address these challenges, we introduce VESPA, a multimodal autolabeling pipeline that fuses the geometric precision of LiDAR with the semantic richness of camera images. Our approach leverages vision-language models (VLMs) to enable open-vocabulary object labeling and to refine detection quality directly in the point cloud domain. VESPA supports the discovery of novel categories and produces high-quality 3D pseudolabels without requiring ground-truth annotations or HD maps. On Nuscenes dataset, VESPA achieves an AP of 52.95% for object discovery and up to 46.54% for multiclass object detection, demonstrating strong performance in scalable 3D scene understanding. Code will be available upon acceptance.
Inconsistency-based Active Learning for LiDAR Object Detection
May 01, 2025Deep learning models for object detection in autonomous driving have recently achieved impressive performance gains and are already being deployed in vehicles worldwide. However, current models require increasingly large datasets for training. Acquiring and labeling such data is costly, necessitating the development of new strategies to optimize this process. Active learning is a promising approach that has been extensively researched in the image domain. In our work, we extend this concept to the LiDAR domain by developing several inconsistency-based sample selection strategies and evaluate their effectiveness in various settings. Our results show that using a naive inconsistency approach based on the number of detected boxes, we achieve the same mAP as the random sampling strategy with 50% of the labeled data.
HeAL3D: Heuristical-enhanced Active Learning for 3D Object Detection
May 01, 2025Active Learning has proved to be a relevant approach to perform sample selection for training models for Autonomous Driving. Particularly, previous works on active learning for 3D object detection have shown that selection of samples in uncontrolled scenarios is challenging. Furthermore, current approaches focus exclusively on the theoretical aspects of the sample selection problem but neglect the practical insights that can be obtained from the extensive literature and application of 3D detection models. In this paper, we introduce HeAL (Heuristical-enhanced Active Learning for 3D Object Detection) which integrates those heuristical features together with Localization and Classification to deliver the most contributing samples to the model's training. In contrast to previous works, our approach integrates heuristical features such as object distance and point-quantity to estimate the uncertainty, which enhance the usefulness of selected samples to train detection models. Our quantitative evaluation on KITTI shows that HeAL presents competitive mAP with respect to the State-of-the-Art, and achieves the same mAP as the full-supervised baseline with only 24% of the samples.
V3LMA: Visual 3D-enhanced Language Model for Autonomous Driving
Apr 30, 2025Large Vision Language Models (LVLMs) have shown strong capabilities in understanding and analyzing visual scenes across various domains. However, in the context of autonomous driving, their limited comprehension of 3D environments restricts their effectiveness in achieving a complete and safe understanding of dynamic surroundings. To address this, we introduce V3LMA, a novel approach that enhances 3D scene understanding by integrating Large Language Models (LLMs) with LVLMs. V3LMA leverages textual descriptions generated from object detections and video inputs, significantly boosting performance without requiring fine-tuning. Through a dedicated preprocessing pipeline that extracts 3D object data, our method improves situational awareness and decision-making in complex traffic scenarios, achieving a score of 0.56 on the LingoQA benchmark. We further explore different fusion strategies and token combinations with the goal of advancing the interpretation of traffic scenes, ultimately enabling safer autonomous driving systems.
EDGAR: An Autonomous Driving Research Platform -- From Feature Development to Real-World Application
Sep 27, 2023
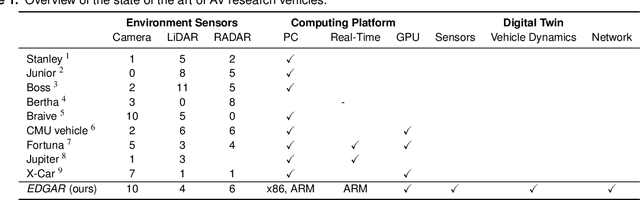

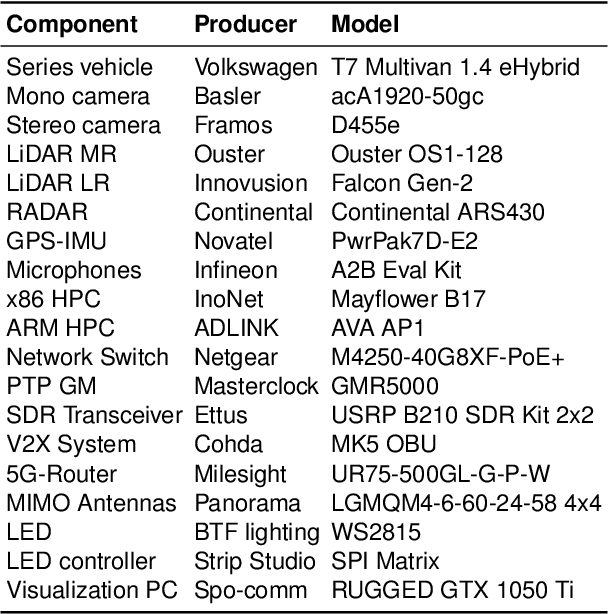
While current research and development of autonomous driving primarily focuses on developing new features and algorithms, the transfer from isolated software components into an entire software stack has been covered sparsely. Besides that, due to the complexity of autonomous software stacks and public road traffic, the optimal validation of entire stacks is an open research problem. Our paper targets these two aspects. We present our autonomous research vehicle EDGAR and its digital twin, a detailed virtual duplication of the vehicle. While the vehicle's setup is closely related to the state of the art, its virtual duplication is a valuable contribution as it is crucial for a consistent validation process from simulation to real-world tests. In addition, different development teams can work with the same model, making integration and testing of the software stacks much easier, significantly accelerating the development process. The real and virtual vehicles are embedded in a comprehensive development environment, which is also introduced. All parameters of the digital twin are provided open-source at https://github.com/TUMFTM/edgar_digital_twin.
Quantifying the LiDAR Sim-to-Real Domain Shift: A Detailed Investigation Using Object Detectors and Analyzing Point Clouds at Target-Level
Mar 03, 2023LiDAR object detection algorithms based on neural networks for autonomous driving require large amounts of data for training, validation, and testing. As real-world data collection and labeling are time-consuming and expensive, simulation-based synthetic data generation is a viable alternative. However, using simulated data for the training of neural networks leads to a domain shift of training and testing data due to differences in scenes, scenarios, and distributions. In this work, we quantify the sim-to-real domain shift by means of LiDAR object detectors trained with a new scenario-identical real-world and simulated dataset. In addition, we answer the questions of how well the simulated data resembles the real-world data and how well object detectors trained on simulated data perform on real-world data. Further, we analyze point clouds at the target-level by comparing real-world and simulated point clouds within the 3D bounding boxes of the targets. Our experiments show that a significant sim-to-real domain shift exists even for our scenario-identical datasets. This domain shift amounts to an average precision reduction of around 14 % for object detectors trained with simulated data. Additional experiments reveal that this domain shift can be lowered by introducing a simple noise model in simulation. We further show that a simple downsampling method to model real-world physics does not influence the performance of the object detectors.