 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Aided Trajectory Planning for Automated Vehicles through Teleoperation and Arbitration Graphs
Feb 04, 2025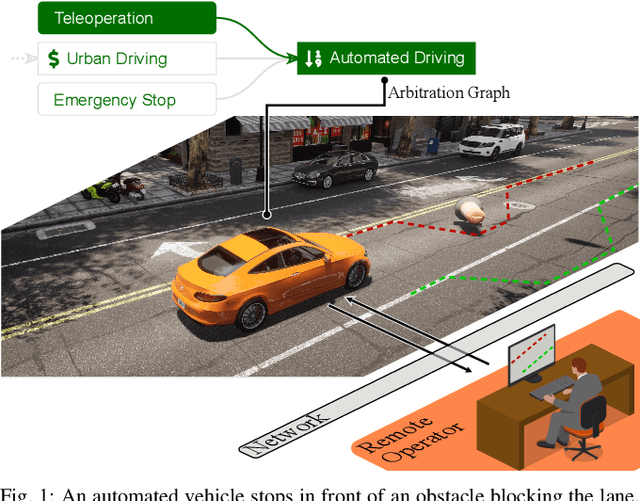

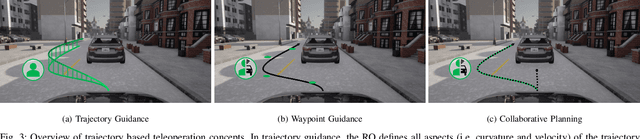
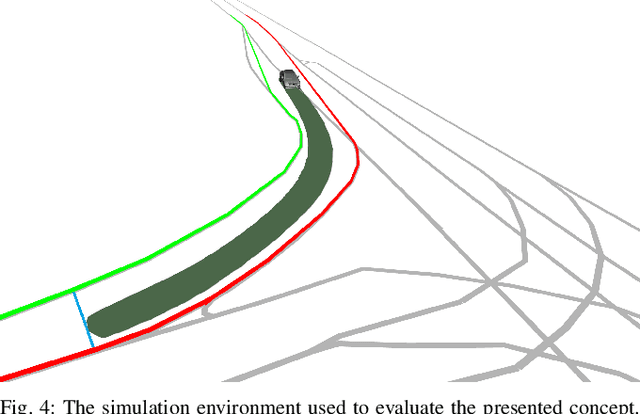
Teleoperation enables remote human support of automated vehicles in scenarios where the automation is not able to find an appropriate solution. Remote assistance concepts, where operators provide discrete inputs to aid specific automation modules like planning, is gaining interest due to its reduced workload on the human remote operator and improved safety. However, these concepts are challenging to implement and maintain due to their deep integration and interaction with the automated driving system. In this paper, we propose a solution to facilitate the implementation of remote assistance concepts that intervene on planning level and extend the operational design domain of the vehicle at runtime. Using arbitration graphs, a modular decision-making framework, we integrate remote assistance into an existing automated driving system without modifying the original software components. Our simulative implementation demonstrates this approach in two use cases, allowing operators to adjust planner constraints and enable trajectory generation beyond nominal operational design domains.
Better Safe Than Sorry: Enhancing Arbitration Graphs for Safe and Robust Autonomous Decision-Making
Nov 15, 2024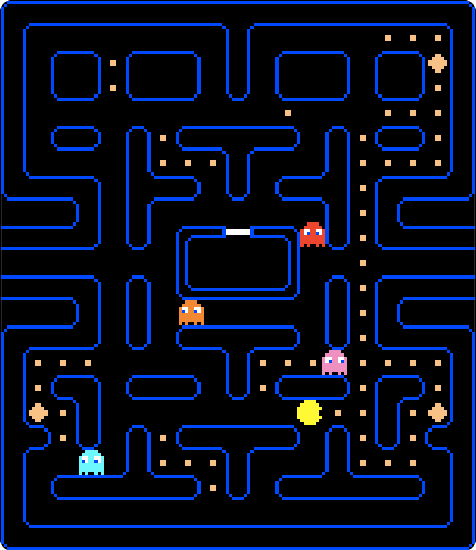

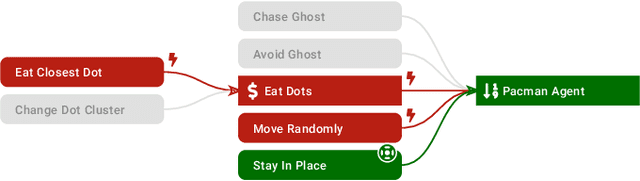
This paper introduces an extension to the arbitration graph framework designed to enhance the safety and robustness of autonomous systems in complex, dynamic environments. Building on the flexibility and scalability of arbitration graphs, the proposed method incorporates a verification step and structured fallback layers in the decision-making process. This ensures that only verified and safe commands are executed while enabling graceful degradation in the presence of unexpected faults or bugs. The approach is demonstrated using a Pac-Man simulation and further validated in the context of autonomous driving, where it shows significant reductions in accident risk and improvements in overall system safety. The bottom-up design of arbitration graphs allows for an incremental integration of new behavior components. The extension presented in this work enables the integration of experimental or immature behavior components while maintaining system safety by clearly and precisely defining the conditions under which behaviors are considered safe. The proposed method is implemented as a ready to use header-only C++ library, published under the MIT License. Together with the Pac-Man demo, it is available at github.com/KIT-MRT/arbitration_graphs.