 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgevEDGAR -- Can CARLA Do HiL?
Dec 09, 2025Simulation offers advantages throughout the development process of automated driving functions, both in research and product development. Common open-source simulators like CARLA are extensively used in training, evaluation, and software-in-the-loop testing of new automated driving algorithms. However, the CARLA simulator lacks an evaluation where research and automated driving vehicles are simulated with their entire sensor and actuation stack in real time. The goal of this work is therefore to create a simulation framework for testing the automation software on its dedicated hardware and identifying its limits. Achieving this goal would greatly benefit the open-source development workflow of automated driving functions, designating CARLA as a consistent evaluation tool along the entire development process. To achieve this goal, in a first step, requirements are derived, and a simulation architecture is specified and implemented. Based on the formulated requirements, the proposed vEDGAR software is evaluated, resulting in a final conclusion on the applicability of CARLA for HiL testing of automated vehicles. The tool is available open source: Modified CARLA fork: https://github.com/TUMFTM/carla, vEDGAR Framework: https://github.com/TUMFTM/vEDGAR
Human-Aided Trajectory Planning for Automated Vehicles through Teleoperation and Arbitration Graphs
Feb 04, 2025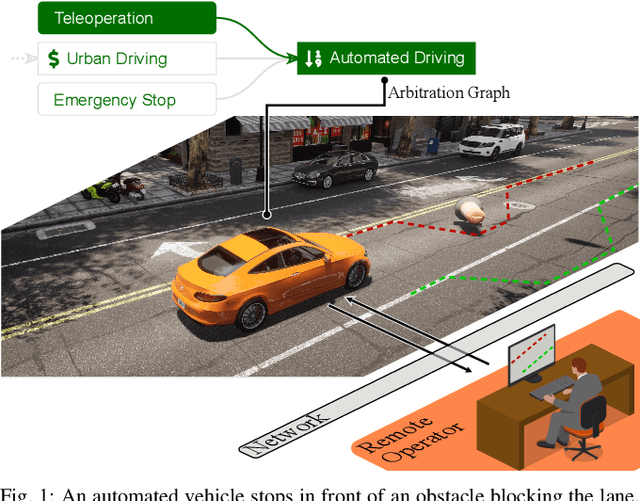

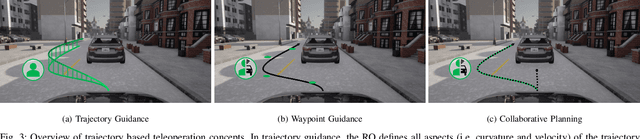
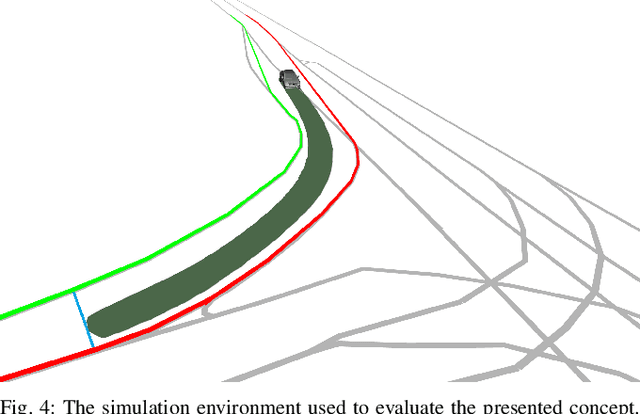
Teleoperation enables remote human support of automated vehicles in scenarios where the automation is not able to find an appropriate solution. Remote assistance concepts, where operators provide discrete inputs to aid specific automation modules like planning, is gaining interest due to its reduced workload on the human remote operator and improved safety. However, these concepts are challenging to implement and maintain due to their deep integration and interaction with the automated driving system. In this paper, we propose a solution to facilitate the implementation of remote assistance concepts that intervene on planning level and extend the operational design domain of the vehicle at runtime. Using arbitration graphs, a modular decision-making framework, we integrate remote assistance into an existing automated driving system without modifying the original software components. Our simulative implementation demonstrates this approach in two use cases, allowing operators to adjust planner constraints and enable trajectory generation beyond nominal operational design domains.
Evaluation of Teleoperation Concepts to solve Automated Vehicle Disengagements
Apr 23, 2024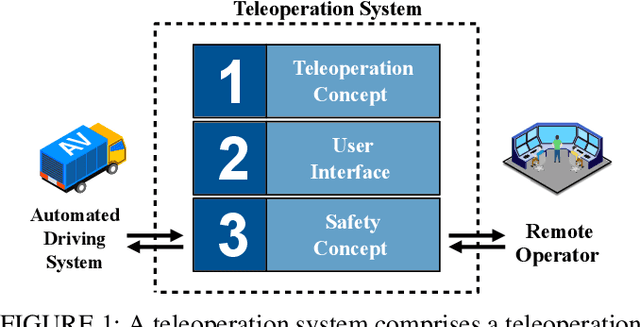
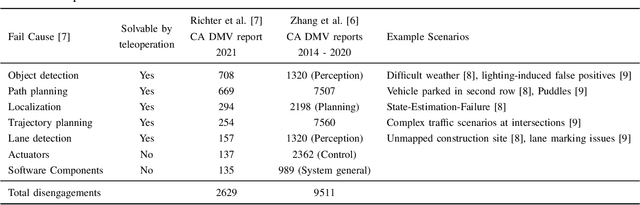
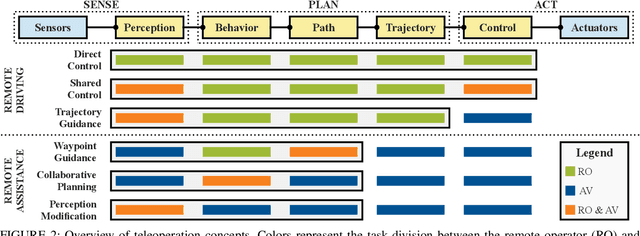

Teleoperation is a popular solution to remotely support highly automated vehicles through a human remote operator whenever a disengagement of the automated driving system is present. The remote operator wirelessly connects to the vehicle and solves the disengagement through support or substitution of automated driving functions and therefore enables the vehicle to resume automation. There are different approaches to support automated driving functions on various levels, commonly known as teleoperation concepts. A variety of teleoperation concepts is described in the literature, yet there has been no comprehensive and structured comparison of these concepts, and it is not clear what subset of teleoperation concepts is suitable to enable safe and efficient remote support of highly automated vehicles in a broad spectrum of disengagements. The following work establishes a basis for comparing teleoperation concepts through a literature overview on automated vehicle disengagements and on already conducted studies on the comparison of teleoperation concepts and metrics used to evaluate teleoperation performance. An evaluation of the teleoperation concepts is carried out in an expert workshop, comparing different teleoperation concepts using a selection of automated vehicle disengagement scenarios and metrics. Based on the workshop results, a set of teleoperation concepts is derived that can be used to address a wide variety of automated vehicle disengagements in a safe and efficient way.