 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShould Teleoperation Be like Driving in a Car? Comparison of Teleoperation HMIs
Apr 26, 2024


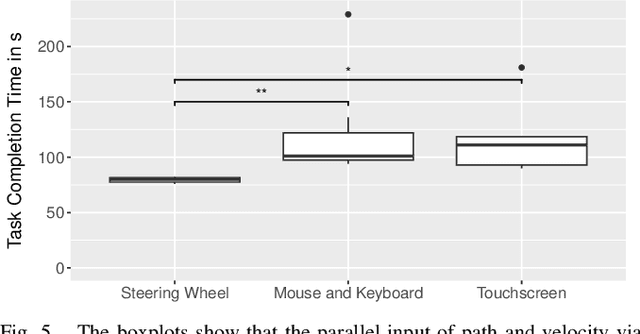
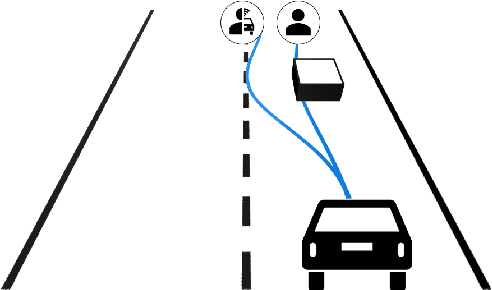
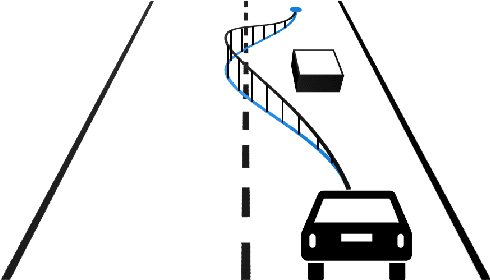
Since Automated Driving Systems are not expected to operate flawlessly, Automated Vehicles will require human assistance in certain situations. For this reason, teleoperation offers the opportunity for a human to be remotely connected to the vehicle and assist it. The Remote Operator can provide extensive support by directly controlling the vehicle, eliminating the need for Automated Driving functions. However, due to the physical disconnection to the vehicle, monitoring and controlling is challenging compared to driving in the vehicle. Therefore, this work follows the approach of simplifying the task for the Remote Operator by separating the path and velocity input. In a study using a miniature vehicle, different operator-vehicle interactions and input devices were compared based on collisions, task completion time, usability and workload. The evaluation revealed significant differences between the three implemented prototypes using a steering wheel, mouse and keyboard or a touchscreen. The separate input of path and velocity via mouse and keyboard or touchscreen is preferred but is slower compared to parallel input via steering wheel.
Evaluation of Teleoperation Concepts to solve Automated Vehicle Disengagements
Apr 23, 2024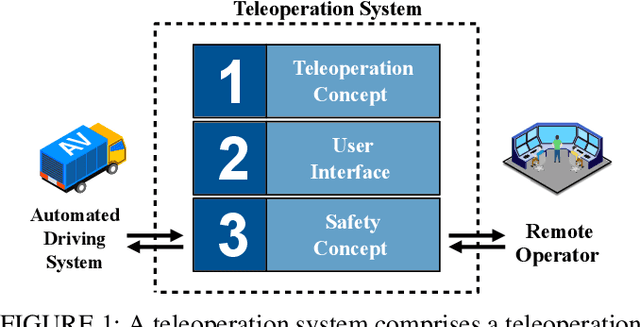
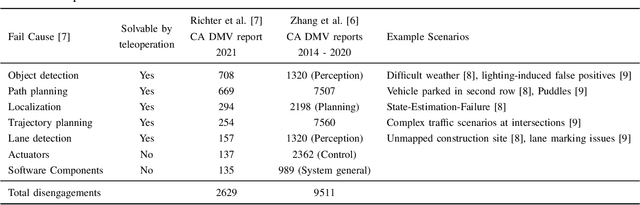
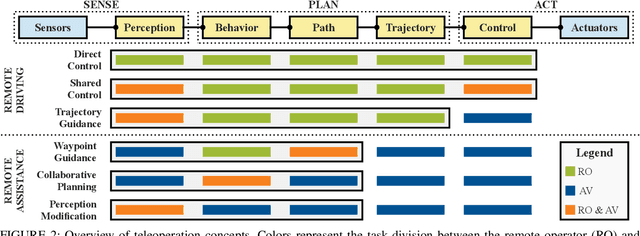

Teleoperation is a popular solution to remotely support highly automated vehicles through a human remote operator whenever a disengagement of the automated driving system is present. The remote operator wirelessly connects to the vehicle and solves the disengagement through support or substitution of automated driving functions and therefore enables the vehicle to resume automation. There are different approaches to support automated driving functions on various levels, commonly known as teleoperation concepts. A variety of teleoperation concepts is described in the literature, yet there has been no comprehensive and structured comparison of these concepts, and it is not clear what subset of teleoperation concepts is suitable to enable safe and efficient remote support of highly automated vehicles in a broad spectrum of disengagements. The following work establishes a basis for comparing teleoperation concepts through a literature overview on automated vehicle disengagements and on already conducted studies on the comparison of teleoperation concepts and metrics used to evaluate teleoperation performance. An evaluation of the teleoperation concepts is carried out in an expert workshop, comparing different teleoperation concepts using a selection of automated vehicle disengagement scenarios and metrics. Based on the workshop results, a set of teleoperation concepts is derived that can be used to address a wide variety of automated vehicle disengagements in a safe and efficient way.
Survey on Teleoperation Concepts for Automated Vehicles
Aug 18, 2022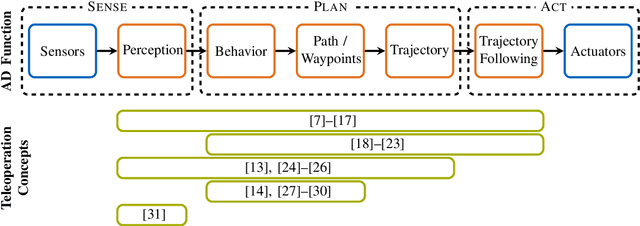
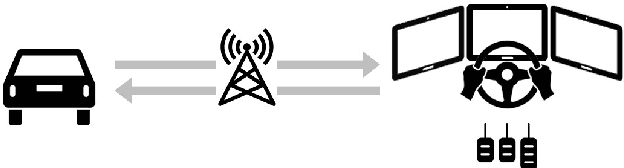
In parallel with the advancement of Automated Driving (AD) functions, teleoperation has grown in popularity over recent years. By enabling remote operation of automated vehicles, teleoperation can be established as a reliable fallback solution for operational design domain limits and edge cases of AD functions. Over the years, a variety of different teleoperation concepts as to how a human operator can remotely support or substitute an AD function have been proposed in the literature. This paper presents the results of a literature survey on teleoperation concepts for road vehicles. Furthermore, due to the increasing interest within the industry, insights on patents and overall company activities in the field of teleoperation are presented.