 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of Teleoperation Concepts to solve Automated Vehicle Disengagements
Apr 23, 2024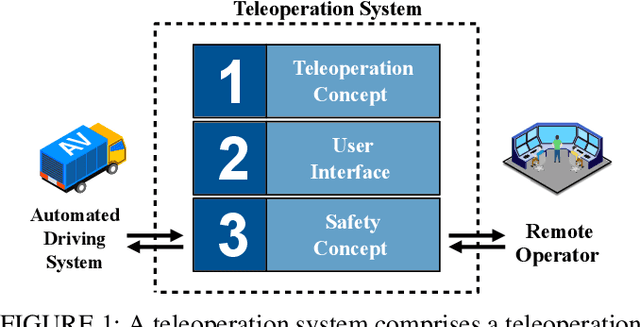
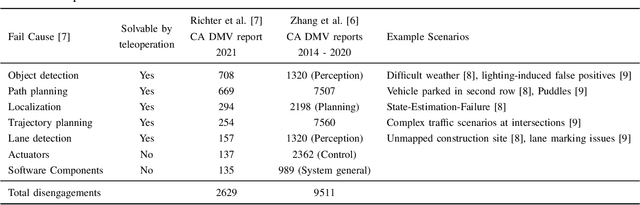
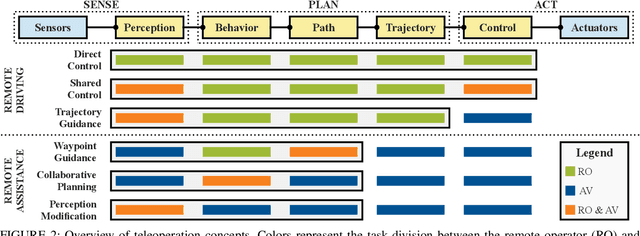

Teleoperation is a popular solution to remotely support highly automated vehicles through a human remote operator whenever a disengagement of the automated driving system is present. The remote operator wirelessly connects to the vehicle and solves the disengagement through support or substitution of automated driving functions and therefore enables the vehicle to resume automation. There are different approaches to support automated driving functions on various levels, commonly known as teleoperation concepts. A variety of teleoperation concepts is described in the literature, yet there has been no comprehensive and structured comparison of these concepts, and it is not clear what subset of teleoperation concepts is suitable to enable safe and efficient remote support of highly automated vehicles in a broad spectrum of disengagements. The following work establishes a basis for comparing teleoperation concepts through a literature overview on automated vehicle disengagements and on already conducted studies on the comparison of teleoperation concepts and metrics used to evaluate teleoperation performance. An evaluation of the teleoperation concepts is carried out in an expert workshop, comparing different teleoperation concepts using a selection of automated vehicle disengagement scenarios and metrics. Based on the workshop results, a set of teleoperation concepts is derived that can be used to address a wide variety of automated vehicle disengagements in a safe and efficient way.