 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of Teleoperation Concepts to solve Automated Vehicle Disengagements
Apr 23, 2024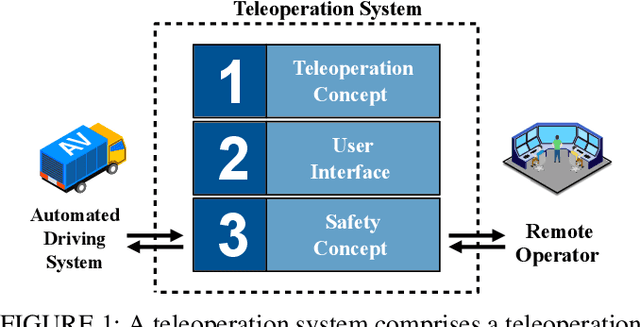
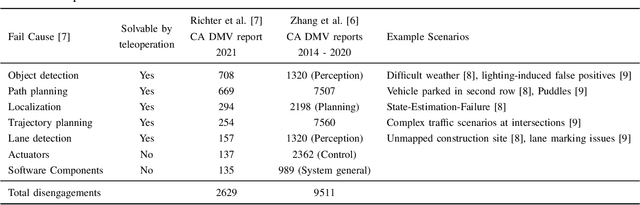
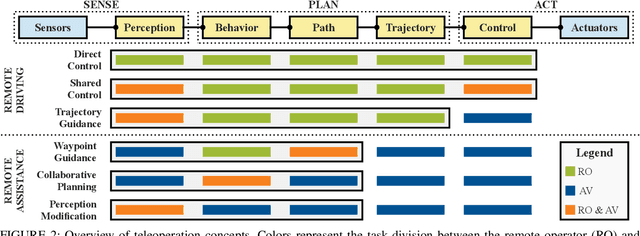

Teleoperation is a popular solution to remotely support highly automated vehicles through a human remote operator whenever a disengagement of the automated driving system is present. The remote operator wirelessly connects to the vehicle and solves the disengagement through support or substitution of automated driving functions and therefore enables the vehicle to resume automation. There are different approaches to support automated driving functions on various levels, commonly known as teleoperation concepts. A variety of teleoperation concepts is described in the literature, yet there has been no comprehensive and structured comparison of these concepts, and it is not clear what subset of teleoperation concepts is suitable to enable safe and efficient remote support of highly automated vehicles in a broad spectrum of disengagements. The following work establishes a basis for comparing teleoperation concepts through a literature overview on automated vehicle disengagements and on already conducted studies on the comparison of teleoperation concepts and metrics used to evaluate teleoperation performance. An evaluation of the teleoperation concepts is carried out in an expert workshop, comparing different teleoperation concepts using a selection of automated vehicle disengagement scenarios and metrics. Based on the workshop results, a set of teleoperation concepts is derived that can be used to address a wide variety of automated vehicle disengagements in a safe and efficient way.
Trajectory Guidance: Enhanced Remote Driving of highly-automated Vehicles
Feb 15, 2024



Despite the rapid technological progress, autonomous vehicles still face a wide range of complex driving situations that require human intervention. Teleoperation technology offers a versatile and effective way to address these challenges. The following work puts existing ideas into a modern context and introduces a novel technical implementation of the trajectory guidance teleoperation concept. The presented system was developed within a high-fidelity simulation environment and experimentally validated, demonstrating a realistic ride-hailing mission with prototype autonomous vehicles and onboard passengers. The results indicate that the proposed concept can be a viable alternative to the existing remote driving options, offering a promising way to enhance teleoperation technology and improve overall operation safety.
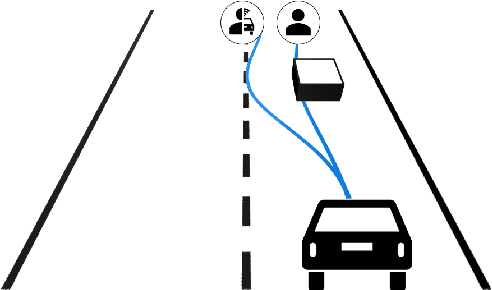
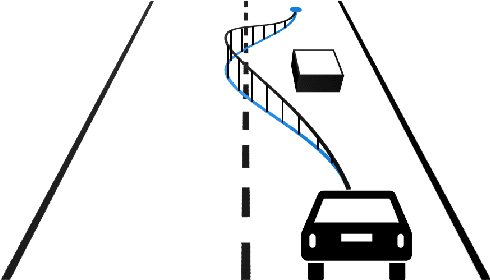
Dynamic Collaborative Path Planning for Remote Assistance of Highly-Automated Vehicles
Aug 29, 2023


Given its increasing popularity in recent years, teleoperation technology is now recognized as a robust fallback solution for Automated Driving (AD). Remote Assistance (RA) represents an event-driven class of teleoperation with a distinct division of tasks between the Autonomous Vehicle (AV) and the remote human operator. This paper presents a novel approach for RA of AVs in urban environments. The concept draws inspiration from the potential synergy between highly-automated systems and human operators to collaboratively solve complex driving situations. Utilizing a hybrid algorithm that makes use of the Operational Design Domain (ODD) modification idea, it considers actions that go beyond the nominal operational space. Combined with the advanced cognitive reasoning of the human remote operator, the concept offers features that hold the potential to significantly improve both RA and AD user experiences.
Driverless road-marking Machines: Ma(r)king the Way towards the Future of Mobility
Sep 07, 2022



Driverless road maintenance could potentially be highly beneficial to all its stakeholders, with the key goals being increased safety for all road participants, more efficient traffic management, and reduced road maintenance costs such that the standard of the road infrastructure is sufficient for it to be used in Automated Driving (AD). This paper addresses how the current state of technology could be expanded to reach those goals. Within the project 'System for Teleoperated Road-marking' (SToRM), using the road-marking machine as the system, different operation modes based on teleoperation were discussed and developed. Furthermore, a functional system overview considering both hardware and software elements was experimentally validated with an actual road-marking machine and should serve as a baseline for future efforts in this and similar areas.
Survey on Teleoperation Concepts for Automated Vehicles
Aug 18, 2022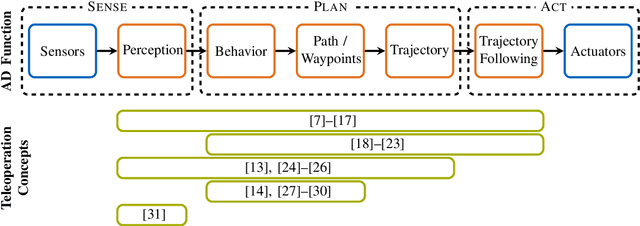
In parallel with the advancement of Automated Driving (AD) functions, teleoperation has grown in popularity over recent years. By enabling remote operation of automated vehicles, teleoperation can be established as a reliable fallback solution for operational design domain limits and edge cases of AD functions. Over the years, a variety of different teleoperation concepts as to how a human operator can remotely support or substitute an AD function have been proposed in the literature. This paper presents the results of a literature survey on teleoperation concepts for road vehicles. Furthermore, due to the increasing interest within the industry, insights on patents and overall company activities in the field of teleoperation are presented.
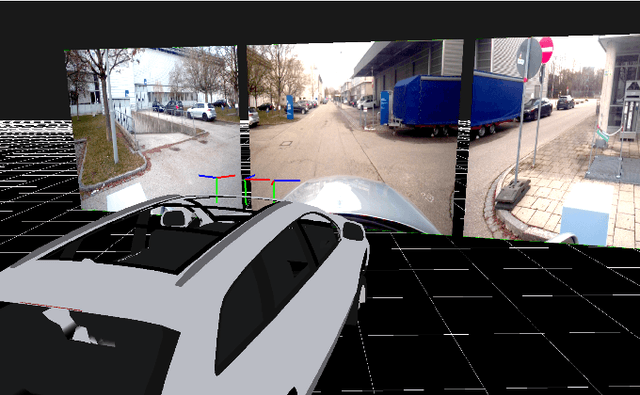
Steering Action-aware Adaptive Cruise Control for Teleoperated Driving
Aug 18, 2022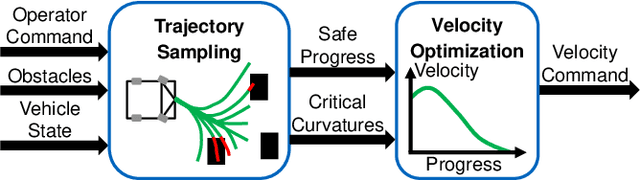


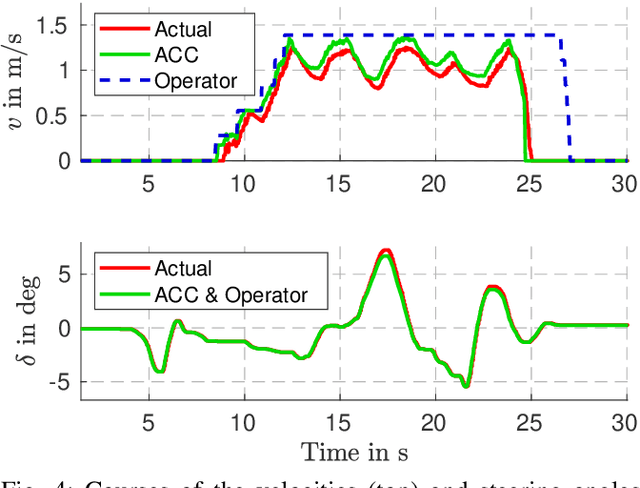
In this paper, a steering action-aware Adaptive Cruise Control (ACC) approach for teleoperated road vehicles is proposed. In order to keep the vehicle in a safe state, the ACC approach can override the human operator's velocity control commands. The safe state is defined as a state from which the vehicle can be stopped safely, no matter which steering actions are applied by the operator. This is achieved by first sampling various potential future trajectories. In a second stage, assuming the trajectory with the highest risk, a safe and comfortable velocity profile is optimized. This yields a safe velocity control command for the vehicle. In simulations, the characteristics of the approach are compared to a Model Predictive Control-based approach that is capable of overriding both, the commanded steering angle as well as the velocity. Furthermore, in teleoperation experiments with a 1:10-scale vehicle testbed, it is demonstrated that the proposed ACC approach keeps the vehicle safe, even if the control commands from the operator would have resulted in a collision.
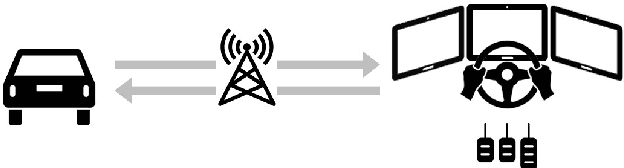
Open Source Software for Teleoperated Driving
Sep 23, 2021


Teleoperation allows a human operator to remotely interact with and control a mobile robot in a dangerous or inaccessible area. Besides well-known applications such as space exploration or search and rescue operations, the application of teleoperation in the area of automated driving, i.e., teleoperated driving (ToD), is becoming more popular. Instead of an in-vehicle human fallback driver, a remote operator can connect to the vehicle using cellular networks and resolve situations that are beyond the automated vehicle (AV)'s operational design domain. Teleoperation of AVs, and unmanned ground vehicles in general, introduces different problems, which are the focus of ongoing research. This paper presents an open source ToD software stack, which was developed for the purpose of carrying out this research. As shown in three demonstrations, the software stack can be deployed with minor overheads to control various vehicle systems remotely.