 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Phoenix Drone: An Open-Source Dual-Rotor Tail-Sitter Platform for Research and Education
Paper and Code
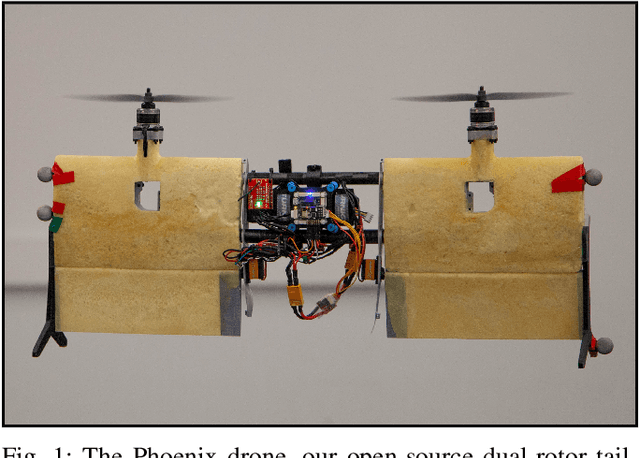
In this paper, we introduce the Phoenix drone: the first completely open-source tail-sitter micro aerial vehicle (MAV) platform. The vehicle has a highly versatile, dual-rotor design and is engineered to be low-cost and easily extensible/modifiable. Our open-source release includes all of the design documents, software resources, and simulation tools needed to build and fly a high-performance tail-sitter for research and educational purposes. The drone has been developed for precision flight with a high degree of control authority. Our design methodology included extensive testing and characterization of the aerodynamic properties of the vehicle. The platform incorporates many off-the-shelf components and 3D-printed parts, in order to keep the cost down. Nonetheless, the paper includes results from flight trials which demonstrate that the vehicle is capable of very stable hovering and accurate trajectory tracking. Our hope is that the open-source Phoenix reference design will be useful to both researchers and educators. In particular, the details in this paper and the available open-source materials should enable learners to gain an understanding of aerodynamics, flight control, state estimation, software design, and simulation, while experimenting with a unique aerial robot.