 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLabelFormer: Object Trajectory Refinement for Offboard Perception from LiDAR Point Clouds
Nov 02, 2023



A major bottleneck to scaling-up training of self-driving perception systems are the human annotations required for supervision. A promising alternative is to leverage "auto-labelling" offboard perception models that are trained to automatically generate annotations from raw LiDAR point clouds at a fraction of the cost. Auto-labels are most commonly generated via a two-stage approach -- first objects are detected and tracked over time, and then each object trajectory is passed to a learned refinement model to improve accuracy. Since existing refinement models are overly complex and lack advanced temporal reasoning capabilities, in this work we propose LabelFormer, a simple, efficient, and effective trajectory-level refinement approach. Our approach first encodes each frame's observations separately, then exploits self-attention to reason about the trajectory with full temporal context, and finally decodes the refined object size and per-frame poses. Evaluation on both urban and highway datasets demonstrates that LabelFormer outperforms existing works by a large margin. Finally, we show that training on a dataset augmented with auto-labels generated by our method leads to improved downstream detection performance compared to existing methods. Please visit the project website for details https://waabi.ai/labelformer
* 20 pages, 8 figures, 7 tables
Data-driven Feature Tracking for Event Cameras
Nov 23, 2022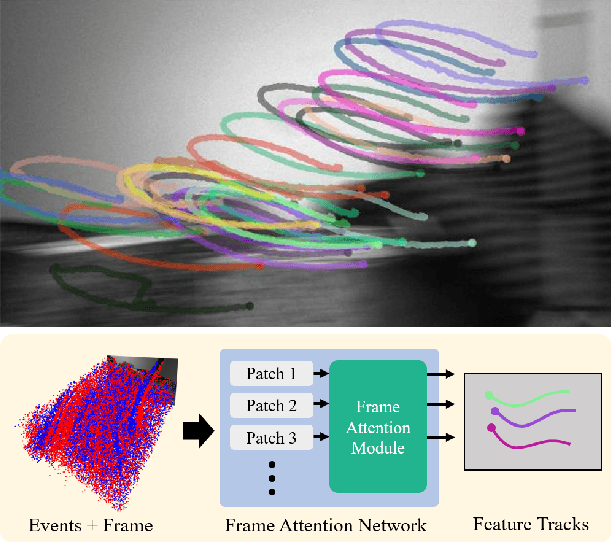
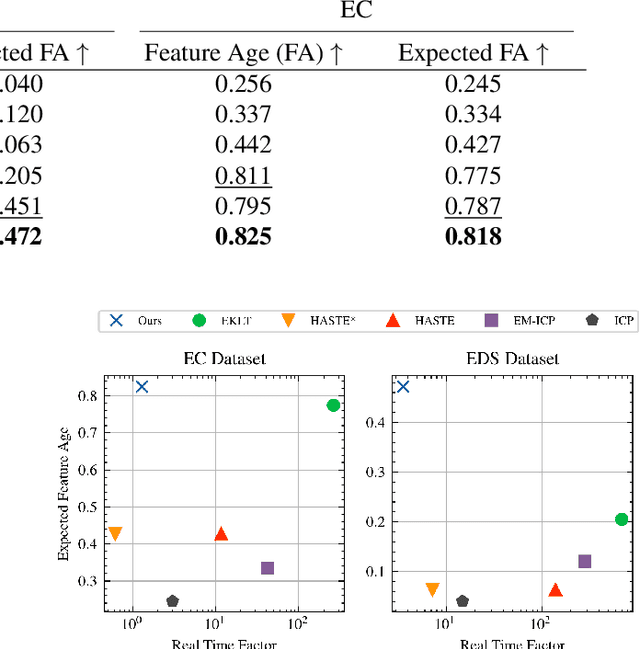
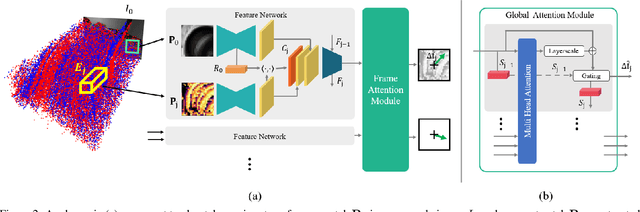
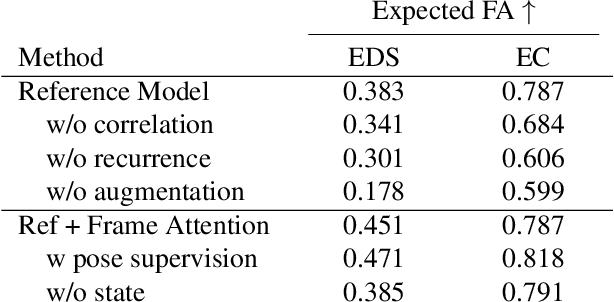
Because of their high temporal resolution, increased resilience to motion blur, and very sparse output, event cameras have been shown to be ideal for low-latency and low-bandwidth feature tracking, even in challenging scenarios. Existing feature tracking methods for event cameras are either handcrafted or derived from first principles but require extensive parameter tuning, are sensitive to noise, and do not generalize to different scenarios due to unmodeled effects. To tackle these deficiencies, we introduce the first data-driven feature tracker for event cameras, which leverages low-latency events to track features detected in a grayscale frame. We achieve robust performance via a novel frame attention module, which shares information across feature tracks. By directly transferring zero-shot from synthetic to real data, our data-driven tracker outperforms existing approaches in relative feature age by up to 120 % while also achieving the lowest latency. This performance gap is further increased to 130 % by adapting our tracker to real data with a novel self-supervision strategy.
HiddenGems: Efficient safety boundary detection with active learning
Oct 25, 2022Evaluating safety performance in a resource-efficient way is crucial for the development of autonomous systems. Simulation of parameterized scenarios is a popular testing strategy but parameter sweeps can be prohibitively expensive. To address this, we propose HiddenGems: a sample-efficient method for discovering the boundary between compliant and non-compliant behavior via active learning. Given a parameterized scenario, one or more compliance metrics, and a simulation oracle, HiddenGems maps the compliant and non-compliant domains of the scenario. The methodology enables critical test case identification, comparative analysis of different versions of the system under test, as well as verification of design objectives. We evaluate HiddenGems on a scenario with a jaywalker crossing in front of an autonomous vehicle and obtain compliance boundary estimates for collision, lane keep, and acceleration metrics individually and in combination, with 6 times fewer simulations than a parameter sweep. We also show how HiddenGems can be used to detect and rectify a failure mode for an unprotected turn with 86% fewer simulations.