 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Unsupervised Object Detection From LiDAR Point Clouds
Paper and Code
Nov 03, 2023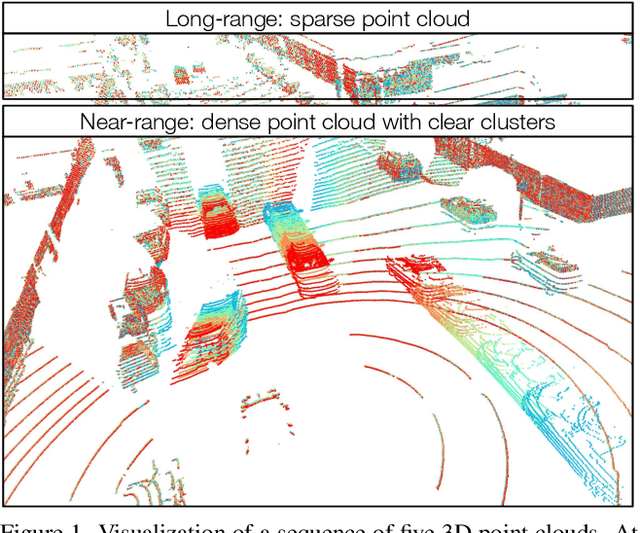
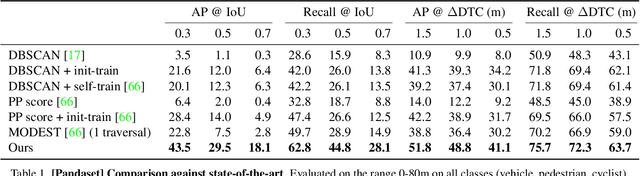
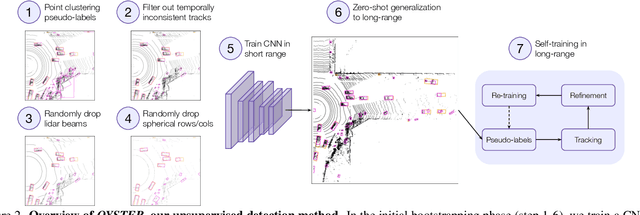
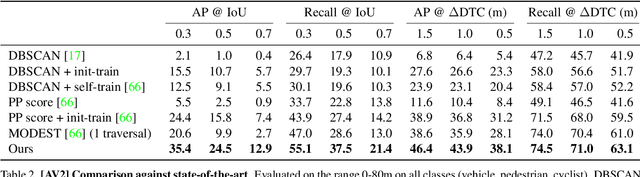
In this paper, we study the problem of unsupervised object detection from 3D point clouds in self-driving scenes. We present a simple yet effective method that exploits (i) point clustering in near-range areas where the point clouds are dense, (ii) temporal consistency to filter out noisy unsupervised detections, (iii) translation equivariance of CNNs to extend the auto-labels to long range, and (iv) self-supervision for improving on its own. Our approach, OYSTER (Object Discovery via Spatio-Temporal Refinement), does not impose constraints on data collection (such as repeated traversals of the same location), is able to detect objects in a zero-shot manner without supervised finetuning (even in sparse, distant regions), and continues to self-improve given more rounds of iterative self-training. To better measure model performance in self-driving scenarios, we propose a new planning-centric perception metric based on distance-to-collision. We demonstrate that our unsupervised object detector significantly outperforms unsupervised baselines on PandaSet and Argoverse 2 Sensor dataset, showing promise that self-supervision combined with object priors can enable object discovery in the wild. For more information, visit the project website: https://waabi.ai/research/oyster