 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding Hindsight Goal Relabeling Requires Rethinking Divergence Minimization
Paper and Code
Sep 26, 2022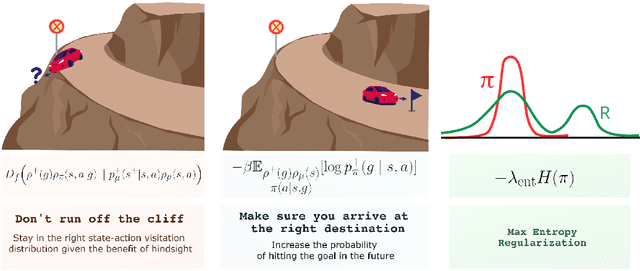
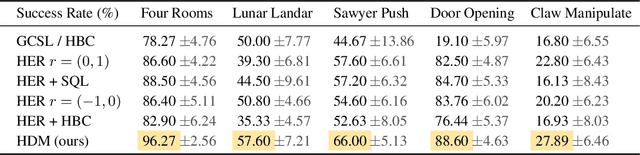
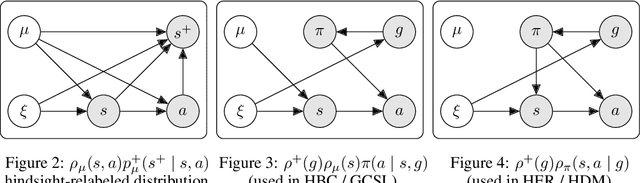
Hindsight goal relabeling has become a foundational technique for multi-goal reinforcement learning (RL). The idea is quite simple: any arbitrary trajectory can be seen as an expert demonstration for reaching the trajectory's end state. Intuitively, this procedure trains a goal-conditioned policy to imitate a sub-optimal expert. However, this connection between imitation and hindsight relabeling is not well understood. Modern imitation learning algorithms are described in the language of divergence minimization, and yet it remains an open problem how to recast hindsight goal relabeling into that framework. In this work, we develop a unified objective for goal-reaching that explains such a connection, from which we can derive goal-conditioned supervised learning (GCSL) and the reward function in hindsight experience replay (HER) from first principles. Experimentally, we find that despite recent advances in goal-conditioned behaviour cloning (BC), multi-goal Q-learning can still outperform BC-like methods; moreover, a vanilla combination of both actually hurts model performance. Under our framework, we study when BC is expected to help, and empirically validate our findings. Our work further bridges goal-reaching and generative modeling, illustrating the nuances and new pathways of extending the success of generative models to RL.