 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Imitation Learning with Conservative World Models
Paper and Code
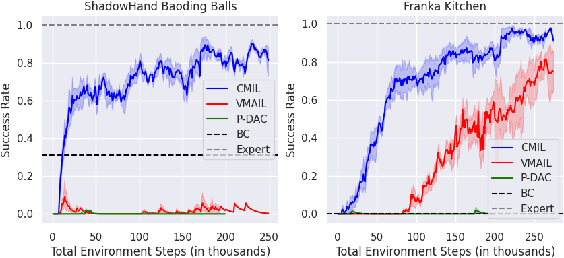
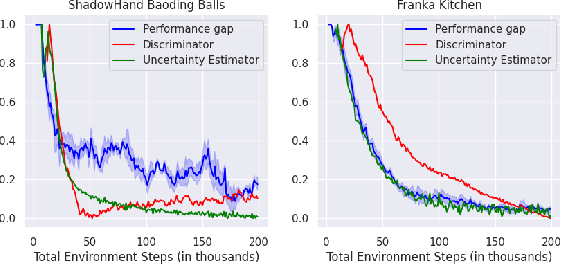
We tackle the problem of policy learning from expert demonstrations without a reward function. A central challenge in this space is that these policies fail upon deployment due to issues of distributional shift, environment stochasticity, or compounding errors. Adversarial imitation learning alleviates this issue but requires additional on-policy training samples for stability, which presents a challenge in realistic domains due to inefficient learning and high sample complexity. One approach to this issue is to learn a world model of the environment, and use synthetic data for policy training. While successful in prior works, we argue that this is sub-optimal due to additional distribution shifts between the learned model and the real environment. Instead, we re-frame imitation learning as a fine-tuning problem, rather than a pure reinforcement learning one. Drawing theoretical connections to offline RL and fine-tuning algorithms, we argue that standard online world model algorithms are not well suited to the imitation learning problem. We derive a principled conservative optimization bound and demonstrate empirically that it leads to improved performance on two very challenging manipulation environments from high-dimensional raw pixel observations. We set a new state-of-the-art performance on the Franka Kitchen environment from images, requiring only 10 demos on no reward labels, as well as solving a complex dexterity manipulation task.