 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCENT: Aligning Mass Spectra with Molecular Structure for Olfactory Perception
May 26, 2026Predicting human olfactory perception from molecular structure has seen remarkable progress, yet these approaches require explicit chemical structure at inference, which is not available in practical sensing settings. We address this gap by exploring direct electron ionization mass spectrometry (EI-MS), a sensing technique that acquires chemically informative fragmentation fingerprints in seconds, as an alternative input modality for olfactory prediction. We contribute Spectrum-to-Chemical Embedding alignmeNT (SCENT), a multi-modal contrastive learning framework that aligns EI-MS representations with pretrained chemical structure embeddings, while requiring only mass spectra at inference. On the multi-label odor descriptor prediction task, SCENT significantly outperforms MS-only baselines and achieves performance comparable to structure-based models, despite requiring no explicit molecular structure at test time. The learned representations also better approximate continuous human perceptual ratings and generalize to real-world lab-measured spectra, suggesting that cross-modal alignment is an effective strategy for grounding analytical spectra in chemical semantics.
Prioritize the Process, Not Just the Outcome: Rewarding Latent Thought Trajectories Improves Reasoning in Looped Language Models
Feb 12, 2026Looped Language Models (LoopLMs) perform multi-step latent reasoning prior to token generation and outperform conventional LLMs on reasoning benchmarks at smaller parameter budgets. However, attempts to further improve LoopLM reasoning with reinforcement learning have failed - standard objectives such as Group Relative Policy Optimization (GRPO) only assign credit to the final latent state, creating a fundamental mismatch with the model's internal computation. To resolve this, we introduce RLTT (Reward Latent Thought Trajectories), a reinforcement learning framework which distributes reward across the full latent reasoning trajectory. RLTT provides dense, trajectory-level credit assignment without relying on external verifiers and can directly replace GRPO with negligible overhead. Across extensive experiments with Ouro-2.6B-Thinking under identical training and inference conditions, RLTT yields substantial improvements over GRPO on challenging mathematical reasoning benchmarks, improving accuracy by +14.4% on MATH-500, +16.6% on AIME24, and +10.0% on BeyondAIME. Despite being trained exclusively on mathematics, RLTT also transfers effectively to non-mathematical reasoning benchmarks, demonstrating the effectiveness of trajectory-level credit assignment for reinforcement learning in LoopLMs.
Test-Time Alignment via Hypothesis Reweighting
Dec 11, 2024Large pretrained models often struggle with underspecified tasks -- situations where the training data does not fully define the desired behavior. For example, chatbots must handle diverse and often conflicting user preferences, requiring adaptability to various user needs. We propose a novel framework to address the general challenge of aligning models to test-time user intent, which is rarely fully specified during training. Our approach involves training an efficient ensemble, i.e., a single neural network with multiple prediction heads, each representing a different function consistent with the training data. Our main contribution is HyRe, a simple adaptation technique that dynamically reweights ensemble members at test time using a small set of labeled examples from the target distribution, which can be labeled in advance or actively queried from a larger unlabeled pool. By leveraging recent advances in scalable ensemble training, our method scales to large pretrained models, with computational costs comparable to fine-tuning a single model. We empirically validate HyRe in several underspecified scenarios, including personalization tasks and settings with distribution shifts. Additionally, with just five preference pairs from each target distribution, the same ensemble adapted via HyRe outperforms the prior state-of-the-art 2B-parameter reward model accuracy across 18 evaluation distributions.
SLIC-UAV: A Method for monitoring recovery in tropical restoration projects through identification of signature species using UAVs
Jun 11, 2020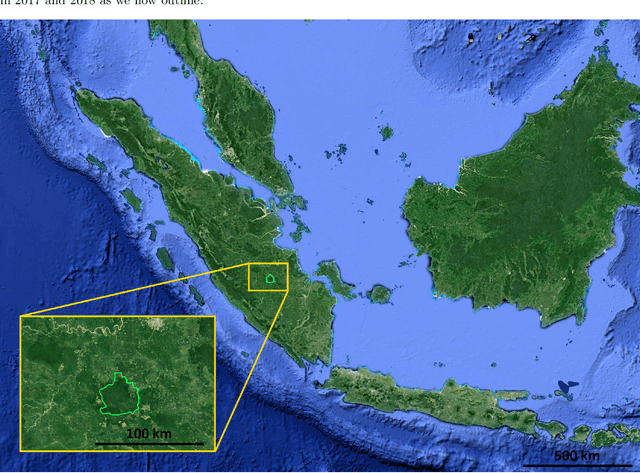
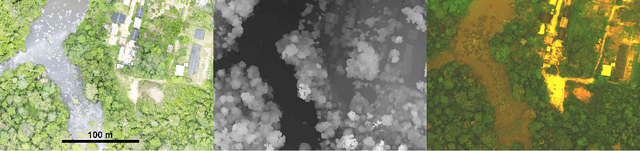

Logged forests cover four million square kilometres of the tropics and restoring these forests is essential if we are to avoid the worst impacts of climate change, yet monitoring recovery is challenging. Tracking the abundance of visually identifiable, early-successional species enables successional status and thereby restoration progress to be evaluated. Here we present a new pipeline, SLIC-UAV, for processing Unmanned Aerial Vehicle (UAV) imagery to map early-successional species in tropical forests. The pipeline is novel because it comprises: (a) a time-efficient approach for labelling crowns from UAV imagery; (b) machine learning of species based on spectral and textural features within individual tree crowns, and (c) automatic segmentation of orthomosaiced UAV imagery into 'superpixels', using Simple Linear Iterative Clustering (SLIC). Creating superpixels reduces the dataset's dimensionality and focuses prediction onto clusters of pixels, greatly improving accuracy. To demonstrate SLIC-UAV, support vector machines and random forests were used to predict the species of hand-labelled crowns in a restoration concession in Indonesia. Random forests were most accurate at discriminating species for whole crowns, with accuracy ranging from 79.3% when mapping five common species, to 90.5% when mapping the three most visually-distinctive species. In contrast, support vector machines proved better for labelling automatically segmented superpixels, with accuracy ranging from 74.3% to 91.7% for the same species. Models were extended to map species across 100 hectares of forest. The study demonstrates the power of SLIC-UAV for mapping characteristic early-successional tree species as an indicator of successional stage within tropical forest restoration areas. Continued effort is needed to develop easy-to-implement and low-cost technology to improve the affordability of project management.
Three-dimensional Segmentation of Trees Through a Flexible Multi-Class Graph Cut Algorithm (MCGC)
Mar 20, 2019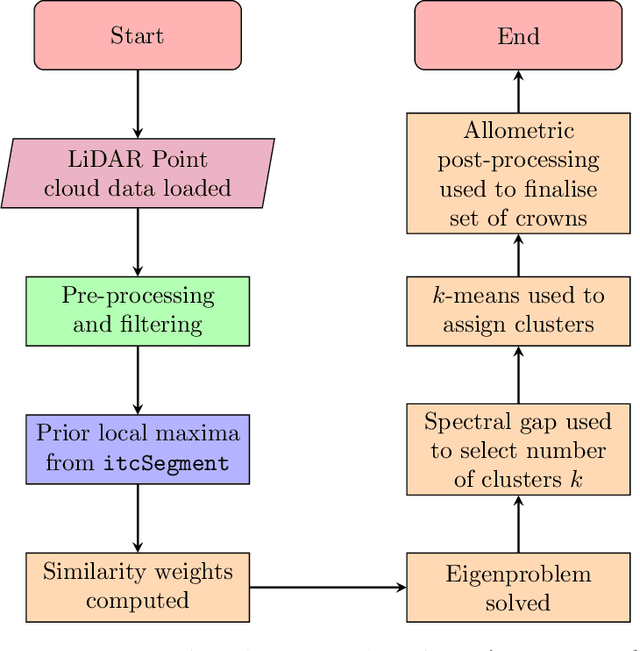

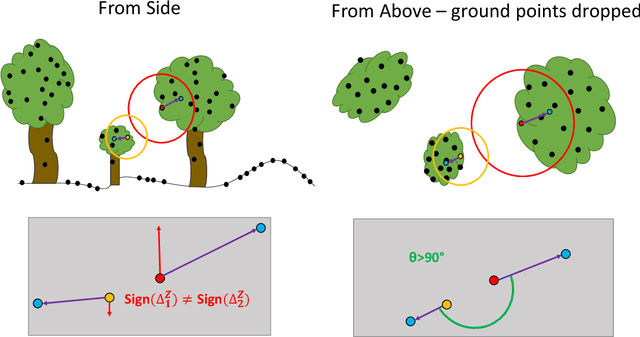
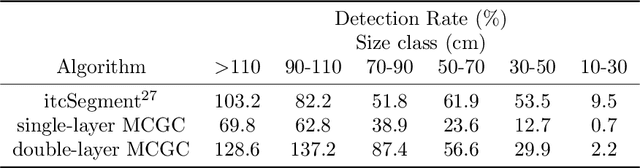
Developing a robust algorithm for automatic individual tree crown (ITC) detection from laser scanning datasets is important for tracking the responses of trees to anthropogenic change. Such approaches allow the size, growth and mortality of individual trees to be measured, enabling forest carbon stocks and dynamics to be tracked and understood. Many algorithms exist for structurally simple forests including coniferous forests and plantations. Finding a robust solution for structurally complex, species-rich tropical forests remains a challenge; existing segmentation algorithms often perform less well than simple area-based approaches when estimating plot-level biomass. Here we describe a Multi-Class Graph Cut (MCGC) approach to tree crown delineation. This uses local three-dimensional geometry and density information, alongside knowledge of crown allometries, to segment individual tree crowns from LiDAR point clouds. Our approach robustly identifies trees in the top and intermediate layers of the canopy, but cannot recognise small trees. From these three-dimensional crowns, we are able to measure individual tree biomass. Comparing these estimates to those from permanent inventory plots, our algorithm is able to produce robust estimates of hectare-scale carbon density, demonstrating the power of ITC approaches in monitoring forests. The flexibility of our method to add additional dimensions of information, such as spectral reflectance, make this approach an obvious avenue for future development and extension to other sources of three-dimensional data, such as structure from motion datasets.