 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepVerge: Classification of Roadside Verge Biodiversity and Conservation Potential
Jun 09, 2022
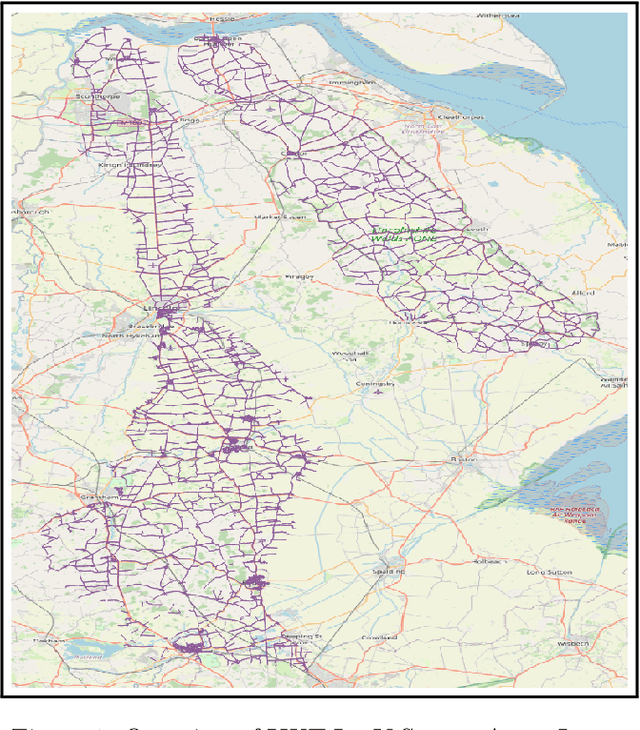
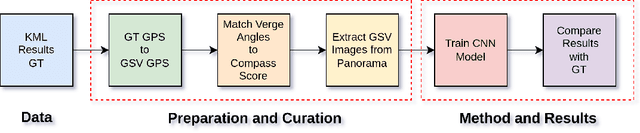

Open space grassland is being increasingly farmed or built upon, leading to a ramping up of conservation efforts targeting roadside verges. Approximately half of all UK grassland species can be found along the country's 500,000 km of roads, with some 91 species either threatened or near threatened. Careful management of these "wildlife corridors" is therefore essential to preventing species extinction and maintaining biodiversity in grassland habitats. Wildlife trusts have often enlisted the support of volunteers to survey roadside verges and identify new "Local Wildlife Sites" as areas of high conservation potential. Using volunteer survey data from 3,900 km of roadside verges alongside publicly available street-view imagery, we present DeepVerge; a deep learning-based method that can automatically survey sections of roadside verges by detecting the presence of positive indicator species. Using images and ground truth survey data from the rural county of Lincolnshire, DeepVerge achieved a mean accuracy of 88%. Such a method may be used by local authorities to identify new local wildlife sites, and aid management and environmental planning in line with legal and government policy obligations, saving thousands of hours of manual labour.
Three-dimensional Segmentation of Trees Through a Flexible Multi-Class Graph Cut Algorithm (MCGC)
Mar 20, 2019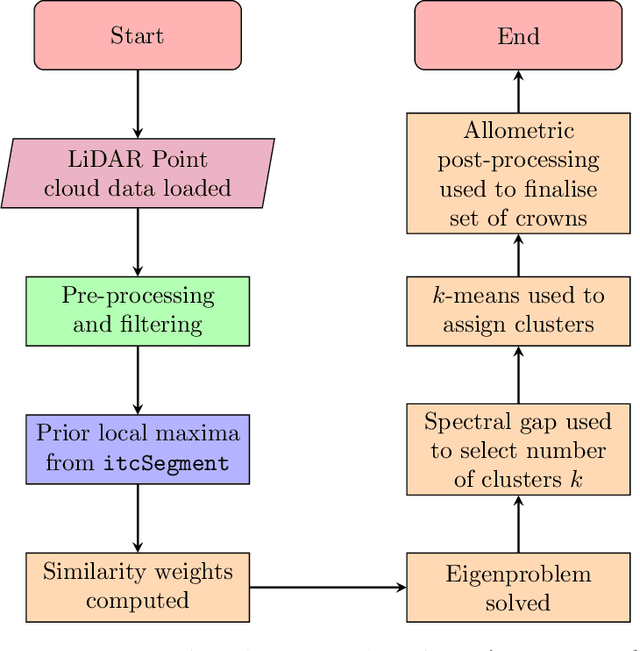

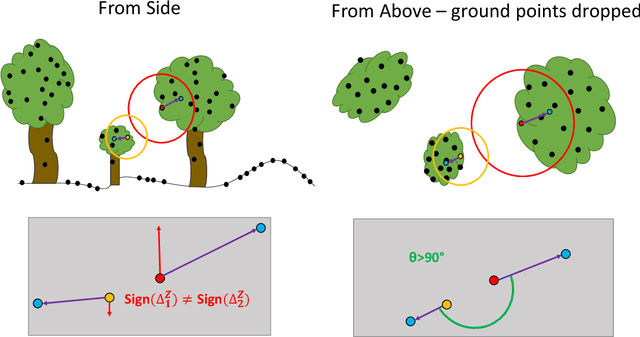
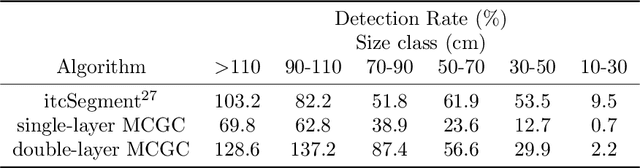
Developing a robust algorithm for automatic individual tree crown (ITC) detection from laser scanning datasets is important for tracking the responses of trees to anthropogenic change. Such approaches allow the size, growth and mortality of individual trees to be measured, enabling forest carbon stocks and dynamics to be tracked and understood. Many algorithms exist for structurally simple forests including coniferous forests and plantations. Finding a robust solution for structurally complex, species-rich tropical forests remains a challenge; existing segmentation algorithms often perform less well than simple area-based approaches when estimating plot-level biomass. Here we describe a Multi-Class Graph Cut (MCGC) approach to tree crown delineation. This uses local three-dimensional geometry and density information, alongside knowledge of crown allometries, to segment individual tree crowns from LiDAR point clouds. Our approach robustly identifies trees in the top and intermediate layers of the canopy, but cannot recognise small trees. From these three-dimensional crowns, we are able to measure individual tree biomass. Comparing these estimates to those from permanent inventory plots, our algorithm is able to produce robust estimates of hectare-scale carbon density, demonstrating the power of ITC approaches in monitoring forests. The flexibility of our method to add additional dimensions of information, such as spectral reflectance, make this approach an obvious avenue for future development and extension to other sources of three-dimensional data, such as structure from motion datasets.