 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Haptic Feedback to Improve Data Quality and Quantity for Deep Imitation Learning Models
Paper and Code
Nov 06, 2022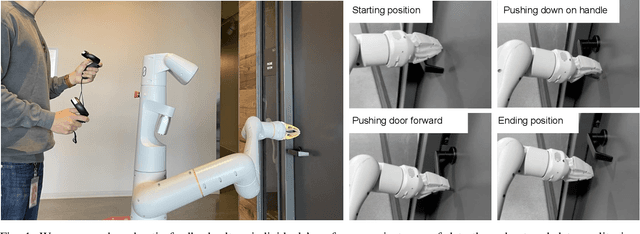
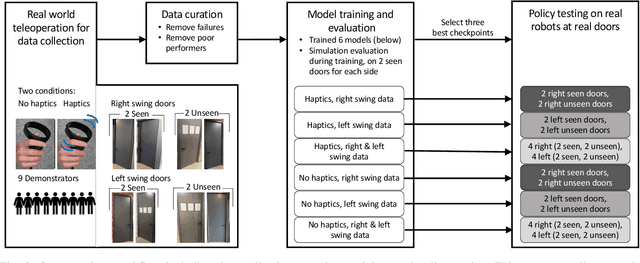
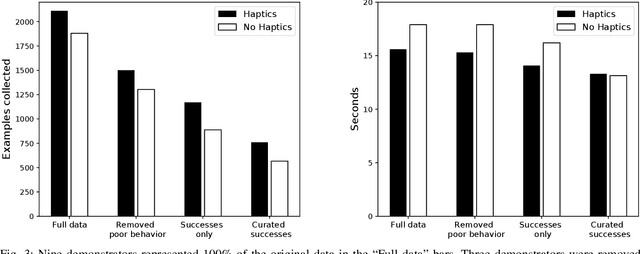
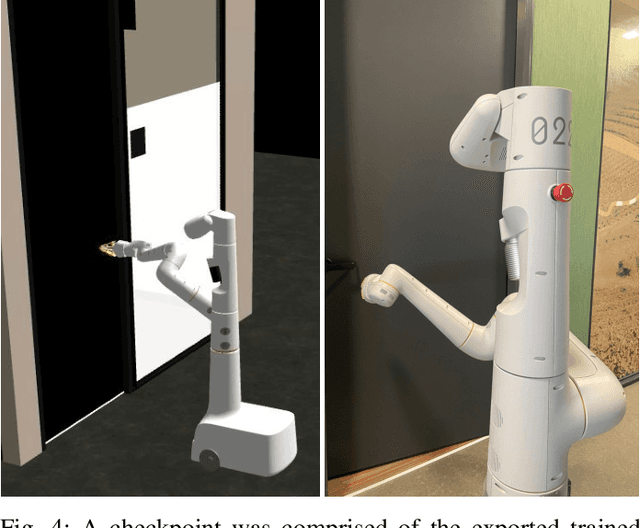
Learning from demonstration (LfD) is a proven technique to teach robots new skills. Data quality and quantity play a critical role in LfD trained model performance. In this paper we analyze the effect of enhancing an existing teleoperation data collection system with real-time haptic feedback; we observe improvements in the collected data throughput and its quality for model training. Our experiment testbed was a mobile manipulator robot that opened doors with latch handles. Evaluation of teleoperated data collection on eight real world conference room doors found that adding the haptic feedback improved the data throughput by 6%. We additionally used the collected data to train six image-based deep imitation learning models, three with haptic feedback and three without it. These models were used to implement autonomous door-opening with the same type of robot used during data collection. Our results show that a policy from a behavior cloning model trained with haptic data performed on average 11% better than its counterpart with no haptic feedback data, indicating that haptic feedback resulted in collection of a higher quality dataset.