 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMusic Mode: Transforming Robot Movement into Music Increases Likability and Perceived Intelligence
Paper and Code
Jun 05, 2023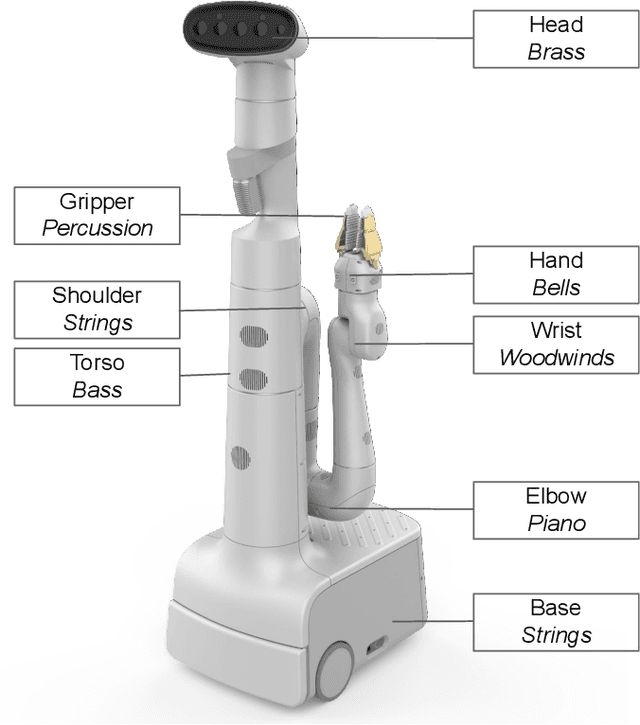
As robots enter everyday spaces like offices, the sounds they create affect how they are perceived. We present "Music Mode", a novel mapping between a robot's joint motions and sounds, programmed by artists and engineers to make the robot generate music as it moves. Two experiments were designed to characterize the effect of this musical augmentation on human users. In the first experiment, a robot performed three tasks while playing three different sound mappings. Results showed that participants observing the robot perceived it as more safe, animate, intelligent, anthropomorphic, and likable when playing the Music Mode Orchestral software. To test whether the results of the first experiment were due to the Music Mode algorithm, rather than music alone, we conducted a second experiment. Here the robot performed the same three tasks, while a participant observed via video, but the Orchestral music was either linked to its movement or random. Participants rated the robots as more intelligent when the music was linked to the movement. Robots using Music Mode logged approximately two hundred hours of operation while navigating, wiping tables, and sorting trash, and bystander comments made during this operating time served as an embedded case study. The contributions are: (1) an interdisciplinary choreographic, musical, and coding design process to develop a real-world robot sound feature, (2) a technical implementation for movement-based sound generation, and (3) two experiments and an embedded case study of robots running this feature during daily work activities that resulted in increased likeability and perceived intelligence of the robot.