Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNonlinear Controller Design for a Quadrotor with Inverted Pendulum
Paper and Code
Aug 04, 2023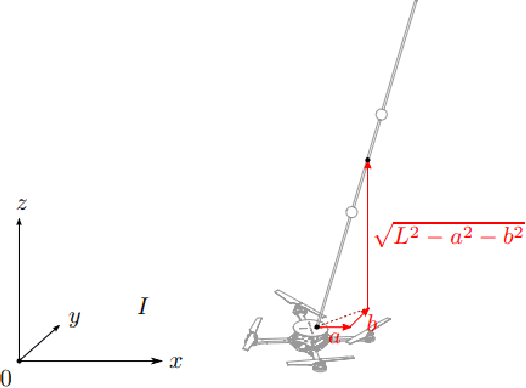



The quadrotor is a $6$ degrees-of-freedom (DoF) system with underactuation. Adding a spherical pendulum on top of a quadrotor further complicates the task of achieving any output tracking while stabilizing the rest. In this report, we present different types of controllers for the nonlinear dynamical system of quadrotor and pendulum combination, utilizing feedback-linearization and control Lyapunov function with quadratic programming (CLF-QP) approaches. We demonstrated trajectory tracking for quadrotor-only case as well as quadrotor-pendulum-combined case.
* This work was done as part of a course project for CDS 233 at Caltech
View paper on