 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFull Stack Navigation, Mapping, and Planning for the Lunar Autonomy Challenge
Mar 18, 2026We present a modular, full-stack autonomy system for lunar surface navigation and mapping developed for the Lunar Autonomy Challenge. Operating in a GNSS-denied, visually challenging environment, our pipeline integrates semantic segmentation, stereo visual odometry, pose graph SLAM with loop closures, and layered planning and control. We leverage lightweight learning-based perception models for real-time segmentation and feature tracking and use a factor-graph backend to maintain globally consistent localization. High-level waypoint planning is designed to promote mapping coverage while encouraging frequent loop closures, and local motion planning uses arc sampling with geometric obstacle checks for efficient, reactive control. We evaluate our approach in the competition's high-fidelity lunar simulator, demonstrating centimeter-level localization accuracy, high-fidelity map generation, and strong repeatability across random seeds and rock distributions. Our solution achieved first place in the final competition evaluation.
GNSS-based Lunar Orbit and Clock Estimation With Stochastic Cloning UD Filter
Jan 23, 2026This paper presents a terrestrial GNSS-based orbit and clock estimation framework for lunar navigation satellites. To enable high-precision estimation under the low-observability conditions encountered at lunar distances, we develop a stochastic-cloning UD-factorized filter and delayed-state smoother that provide enhanced numerical stability when processing precise time-differenced carrier phase (TDCP) measurements. A comprehensive dynamics and measurement model is formulated, explicitly accounting for relativistic coupling between orbital and clock states, lunar time-scale transformations, and signal propagation delays including ionospheric, plasmaspheric, and Shapiro effects. The proposed approach is evaluated using high-fidelity Monte-Carlo simulations incorporating realistic multi-constellation GNSS geometry, broadcast ephemeris errors, lunar satellite dynamics, and ionospheric and plasmaspheric delay computed from empirical electron density models. Simulation results demonstrate that combining ionosphere-free pseudorange and TDCP measurements achieves meter-level orbit accuracy and sub-millimeter-per-second velocity accuracy, satisfying the stringent signal-in-space error requirements of future Lunar Augmented Navigation Services (LANS).
Satellite Autonomous Clock Fault Monitoring with Inter-Satellite Ranges Using Euclidean Distance Matrices
May 02, 2025To address the need for robust positioning, navigation, and timing services in lunar environments, this paper proposes a novel onboard clock phase jump detection framework for satellite constellations using range measurements obtained from dual one-way inter-satellite links. Our approach leverages vertex redundantly rigid graphs to detect faults without relying on prior knowledge of satellite positions or clock biases, providing flexibility for lunar satellite networks with diverse satellite types and operators. We model satellite constellations as graphs, where satellites are vertices and inter-satellite links are edges. The proposed algorithm detects and identifies satellites with clock jumps by monitoring the singular values of the geometric-centered Euclidean distance matrix (GCEDM) of 5-clique sub-graphs. The proposed method is validated through simulations of a GPS constellation and a notional constellation around the Moon, demonstrating its effectiveness in various configurations.
Autonomous Constellation Fault Monitoring with Inter-satellite Links: A Rigidity-Based Approach
Jun 14, 2024To address the need for robust positioning, navigation, and timing services in lunar and Martian environments, this paper proposes a novel fault detection framework for satellite constellations using inter-satellite ranging (ISR). Traditional fault monitoring methods rely on intense monitoring from ground-based stations, which are impractical for lunar and Martian missions due to cost constraints. Our approach leverages graph-rigidity theory to detect faults without relying on precise ephemeris. We model satellite constellations as graphs where satellites are vertices and inter-satellite links are edges. By analyzing the Euclidean Distance Matrix (EDM) derived from ISR measurements, we identify faults through the singular values of the geometric-centered EDM (GCEDM). A neural network predictor is employed to handle the diverse geometry of the graph, enhancing fault detection robustness. The proposed method is validated through simulations of constellations around Mars and the Moon, demonstrating its effectiveness in various configurations. This research contributes to the reliable operation of satellite constellations for future lunar and Martian exploration missions.
Deep Reinforcement Learning for Safe Landing Site Selection with Concurrent Consideration of Divert Maneuvers
Feb 24, 2021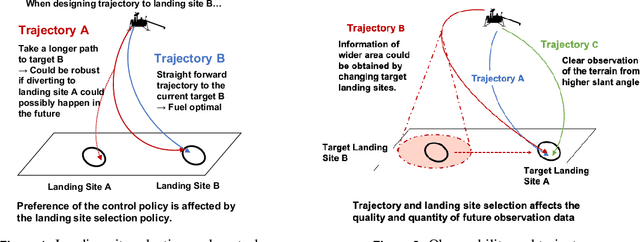
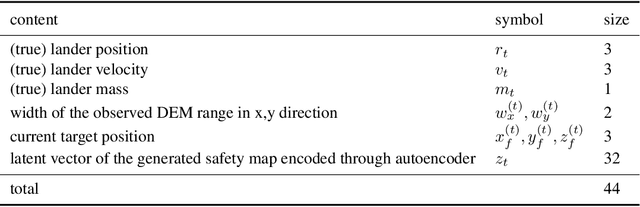
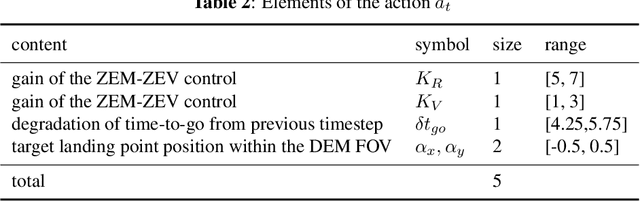
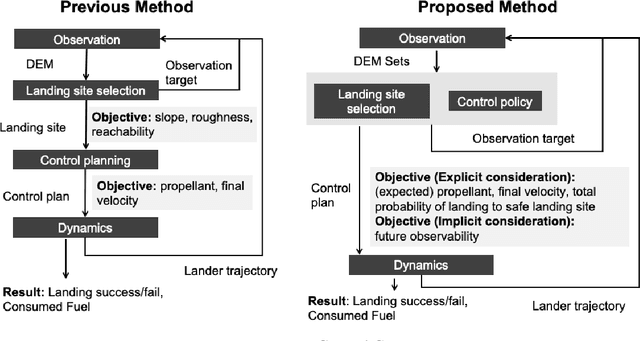
This research proposes a new integrated framework for identifying safe landing locations and planning in-flight divert maneuvers. The state-of-the-art algorithms for landing zone selection utilize local terrain features such as slopes and roughness to judge the safety and priority of the landing point. However, when there are additional chances of observation and diverting in the future, these algorithms are not able to evaluate the safety of the decision itself to target the selected landing point considering the overall descent trajectory. In response to this challenge, we propose a reinforcement learning framework that optimizes a landing site selection strategy concurrently with a guidance and control strategy to the target landing site. The trained agent could evaluate and select landing sites with explicit consideration of the terrain features, quality of future observations, and control to achieve a safe and efficient landing trajectory at a system-level. The proposed framework was able to achieve 94.8 $\%$ of successful landing in highly challenging landing sites where over 80$\%$ of the area around the initial target lading point is hazardous, by effectively updating the target landing site and feedback control gain during descent.