 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning for Safe Landing Site Selection with Concurrent Consideration of Divert Maneuvers
Feb 24, 2021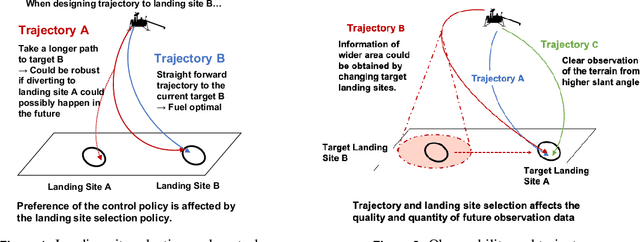
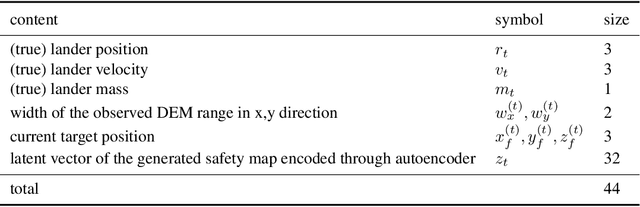
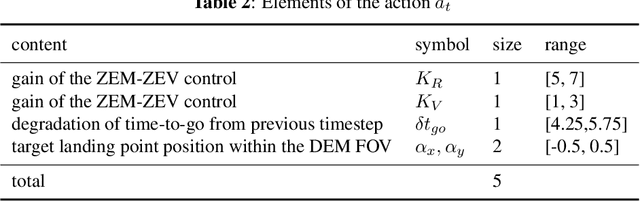
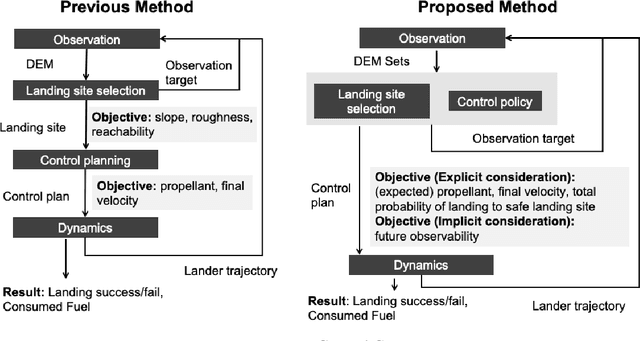
This research proposes a new integrated framework for identifying safe landing locations and planning in-flight divert maneuvers. The state-of-the-art algorithms for landing zone selection utilize local terrain features such as slopes and roughness to judge the safety and priority of the landing point. However, when there are additional chances of observation and diverting in the future, these algorithms are not able to evaluate the safety of the decision itself to target the selected landing point considering the overall descent trajectory. In response to this challenge, we propose a reinforcement learning framework that optimizes a landing site selection strategy concurrently with a guidance and control strategy to the target landing site. The trained agent could evaluate and select landing sites with explicit consideration of the terrain features, quality of future observations, and control to achieve a safe and efficient landing trajectory at a system-level. The proposed framework was able to achieve 94.8 $\%$ of successful landing in highly challenging landing sites where over 80$\%$ of the area around the initial target lading point is hazardous, by effectively updating the target landing site and feedback control gain during descent.