 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Stochastic Terrain Mapping and Processing for Autonomous Safe Landing
Sep 14, 2024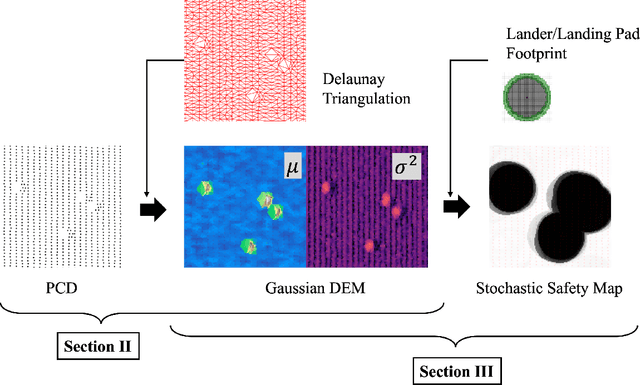
Onboard terrain sensing and mapping for safe planetary landings often suffer from missed hazardous features, e.g., small rocks, due to the large observational range and the limited resolution of the obtained terrain data. To this end, this paper develops a novel real-time stochastic terrain mapping algorithm that accounts for topographic uncertainty between the sampled points, or the uncertainty due to the sparse 3D terrain measurements. We introduce a Gaussian digital elevation map that is efficiently constructed using the combination of Delauney triangulation and local Gaussian process regression. The geometric investigation of the lander-terrain interaction is exploited to efficiently evaluate the marginally conservative local slope and roughness while avoiding the costly computation of the local plane. The conservativeness is proved in the paper. The developed real-time uncertainty quantification pipeline enables stochastic landing safety evaluation under challenging operational conditions, such as a large observational range or limited sensor capability, which is a critical stepping stone for the development of predictive guidance algorithms for safe autonomous planetary landing. Detailed reviews on background and related works are also presented.
Stochastic Hazard Detection For Landing Under Topographic Uncertainty
May 07, 2023Autonomous hazard detection and avoidance is a key technology for future landing missions in unknown surface conditions. Current state-of-the-art stochastic algorithms assume simple Gaussian measurement noise on dense, high-fidelity digital elevation maps, limiting the algorithm's applicability. This paper introduces a new stochastic hazard detection algorithm capable of more general topographic uncertainty by leveraging the Gaussian random field regression. The proposed approach enables the safety assessment with imperfect and sparse sensor measurements, which allows hazard detection operations under more diverse conditions. We demonstrate the performance of the proposed approach on the existing Mars digital terrain models.
Deep Monocular Hazard Detection for Safe Small Body Landing
Jan 30, 2023Hazard detection and avoidance is a key technology for future robotic small body sample return and lander missions. Current state-of-the-practice methods rely on high-fidelity, a priori terrain maps, which require extensive human-in-the-loop verification and expensive reconnaissance campaigns to resolve mapping uncertainties. We propose a novel safety mapping paradigm that leverages deep semantic segmentation techniques to predict landing safety directly from a single monocular image, thus reducing reliance on high-fidelity, a priori data products. We demonstrate precise and accurate safety mapping performance on real in-situ imagery of prospective sample sites from the OSIRIS-REx mission.
Hierarchical Reinforcement Learning Framework for Stochastic Spaceflight Campaign Design
Mar 16, 2021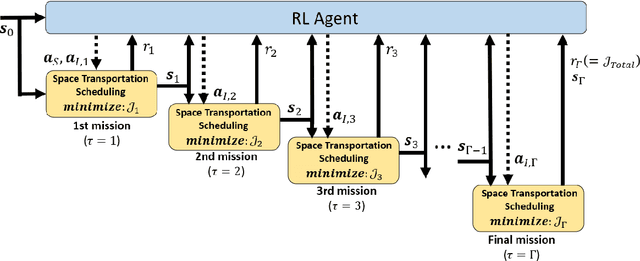

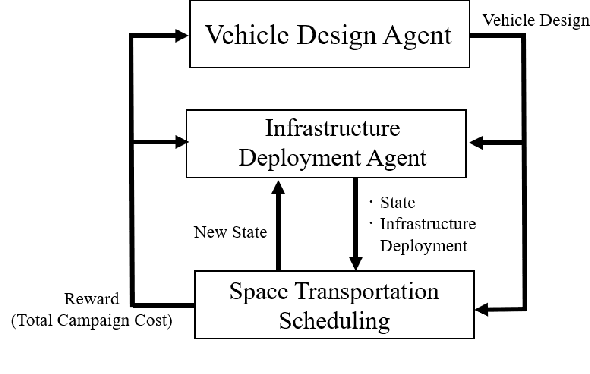
This paper develops a hierarchical reinforcement learning architecture for multi-mission spaceflight campaign design under uncertainty, including vehicle design, infrastructure deployment planning, and space transportation scheduling. This problem involves a high-dimensional design space and is challenging especially with uncertainty present. To tackle this challenge, the developed framework has a hierarchical structure with reinforcement learning (RL) and network-based mixed-integer linear programming (MILP), where the former optimizes campaign-level decisions (e.g., design of the vehicle used throughout the campaign, destination demand assigned to each mission in the campaign), whereas the latter optimizes the detailed mission-level decisions (e.g., when to launch what from where to where). The framework is applied to a set of human lunar exploration campaign scenarios with uncertain in-situ resource utilization (ISRU) performance as a case study. The main value of this work is its integration of the rapidly growing RL research and the existing MILP-based space logistics methods through a hierarchical framework to handle the otherwise intractable complexity of space mission design under uncertainty. We expect this unique framework to be a critical steppingstone for the emerging research direction of artificial intelligence for space mission design.
Deep Reinforcement Learning for Safe Landing Site Selection with Concurrent Consideration of Divert Maneuvers
Feb 24, 2021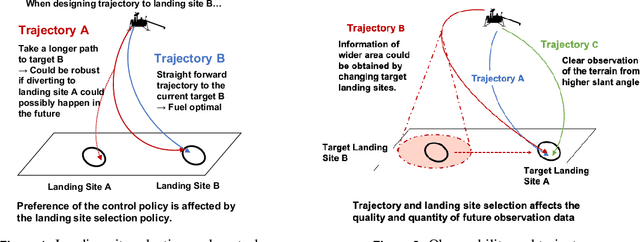
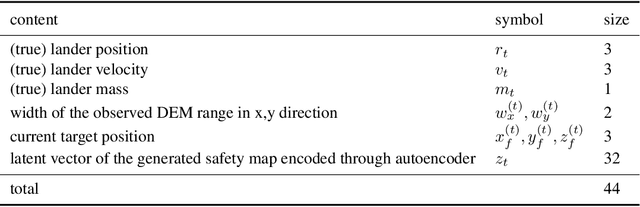
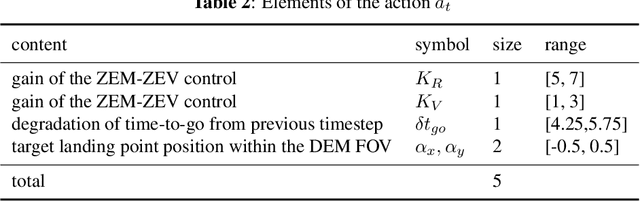
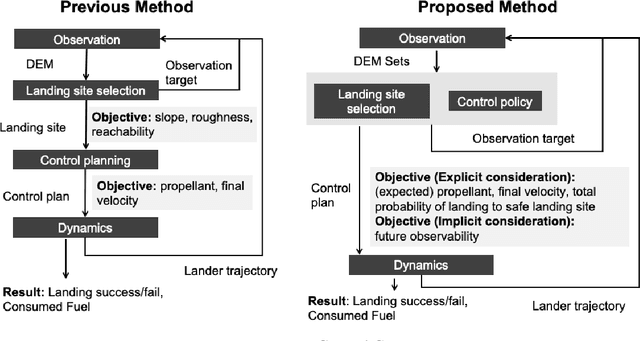
This research proposes a new integrated framework for identifying safe landing locations and planning in-flight divert maneuvers. The state-of-the-art algorithms for landing zone selection utilize local terrain features such as slopes and roughness to judge the safety and priority of the landing point. However, when there are additional chances of observation and diverting in the future, these algorithms are not able to evaluate the safety of the decision itself to target the selected landing point considering the overall descent trajectory. In response to this challenge, we propose a reinforcement learning framework that optimizes a landing site selection strategy concurrently with a guidance and control strategy to the target landing site. The trained agent could evaluate and select landing sites with explicit consideration of the terrain features, quality of future observations, and control to achieve a safe and efficient landing trajectory at a system-level. The proposed framework was able to achieve 94.8 $\%$ of successful landing in highly challenging landing sites where over 80$\%$ of the area around the initial target lading point is hazardous, by effectively updating the target landing site and feedback control gain during descent.
Uncertainty-Aware Deep Learning for Autonomous Safe Landing Site Selection
Feb 21, 2021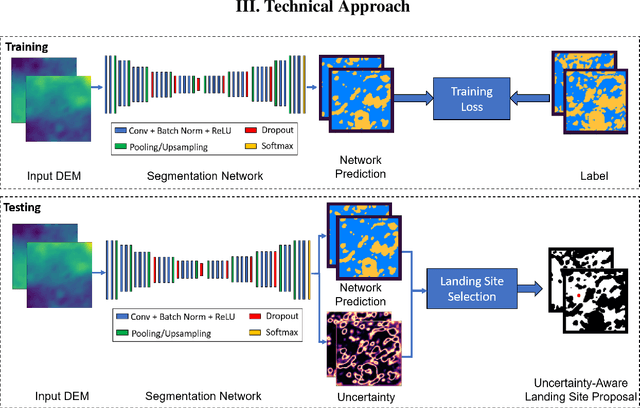
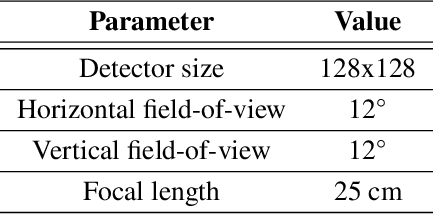
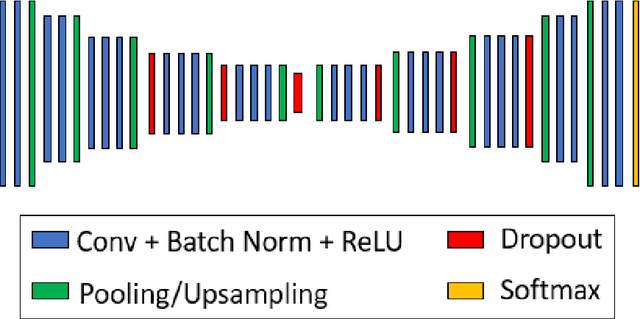
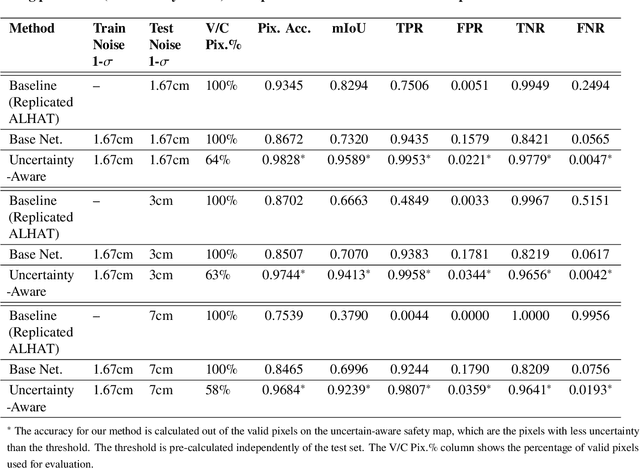
Hazard detection is critical for enabling autonomous landing on planetary surfaces. Current state-of-the-art methods leverage traditional computer vision approaches to automate identification of safe terrain from input digital elevation models (DEMs). However, performance for these methods can degrade for input DEMs with increased sensor noise. At the same time, deep learning techniques have been developed for various applications. Nevertheless, their applicability to safety-critical space missions has been often limited due to concerns regarding their outputs' reliability. In response to this background, this paper proposes an uncertainty-aware learning-based method for hazard detection and landing site selection. The developed approach enables reliable safe landing site selection by: (i) generating a safety prediction map and its uncertainty map together via Bayesian deep learning and semantic segmentation; and (ii) using the generated uncertainty map to filter out the uncertain pixels in the prediction map so that the safe landing site selection is performed only based on the certain pixels (i.e., pixels for which the model is certain about its safety prediction). Experiments are presented with simulated data based on a Mars HiRISE digital terrain model and varying noise levels to demonstrate the performance of the proposed approach.