 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Aware Deep Learning for Autonomous Safe Landing Site Selection
Paper and Code
Feb 21, 2021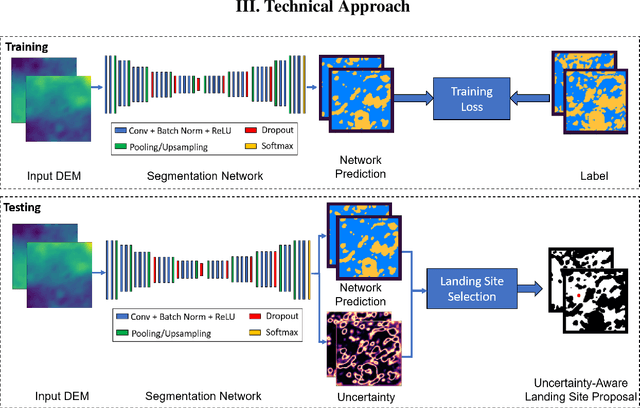
Hazard detection is critical for enabling autonomous landing on planetary surfaces. Current state-of-the-art methods leverage traditional computer vision approaches to automate identification of safe terrain from input digital elevation models (DEMs). However, performance for these methods can degrade for input DEMs with increased sensor noise. At the same time, deep learning techniques have been developed for various applications. Nevertheless, their applicability to safety-critical space missions has been often limited due to concerns regarding their outputs' reliability. In response to this background, this paper proposes an uncertainty-aware learning-based method for hazard detection and landing site selection. The developed approach enables reliable safe landing site selection by: (i) generating a safety prediction map and its uncertainty map together via Bayesian deep learning and semantic segmentation; and (ii) using the generated uncertainty map to filter out the uncertain pixels in the prediction map so that the safe landing site selection is performed only based on the certain pixels (i.e., pixels for which the model is certain about its safety prediction). Experiments are presented with simulated data based on a Mars HiRISE digital terrain model and varying noise levels to demonstrate the performance of the proposed approach.