 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAstroSplat: Physics-Based Gaussian Splatting for Rendering and Reconstruction of Small Celestial Bodies
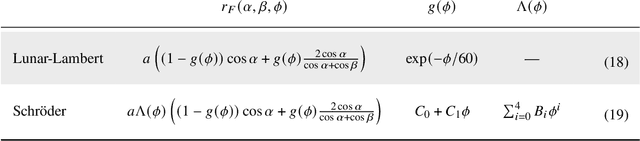
Mar 12, 2026Image-based surface reconstruction and characterization are crucial for missions to small celestial bodies (e.g., asteroids), as it informs mission planning, navigation, and scientific analysis. Recent advances in Gaussian splatting enable high-fidelity neural scene representations but typically rely on a spherical harmonic intensity parameterization that is strictly appearance-based and does not explicitly model material properties or light-surface interactions. We introduce AstroSplat, a physics-based Gaussian splatting framework that integrates planetary reflectance models to improve the autonomous reconstruction and photometric characterization of small-body surfaces from in-situ imagery. The proposed framework is validated on real imagery taken by NASA's Dawn mission, where we demonstrate superior rendering performance and surface reconstruction accuracy compared to the typical spherical harmonic parameterization.
Stereophotoclinometry Revisited
Apr 11, 2025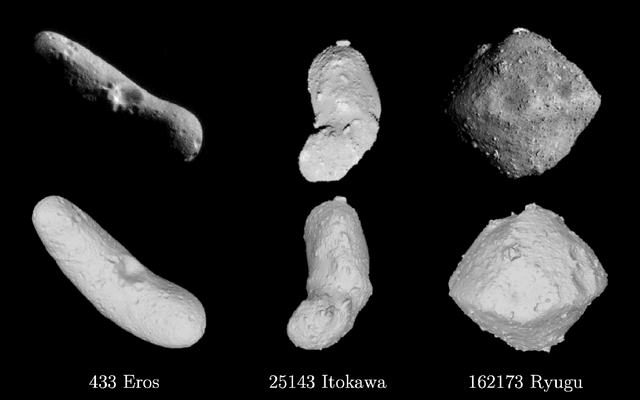
Image-based surface reconstruction and characterization is crucial for missions to small celestial bodies, as it informs mission planning, navigation, and scientific analysis. However, current state-of-the-practice methods, such as stereophotoclinometry (SPC), rely heavily on human-in-the-loop verification and high-fidelity a priori information. This paper proposes Photoclinometry-from-Motion (PhoMo), a novel framework that incorporates photoclinometry techniques into a keypoint-based structure-from-motion (SfM) system to estimate the surface normal and albedo at detected landmarks to improve autonomous surface and shape characterization of small celestial bodies from in-situ imagery. In contrast to SPC, we forego the expensive maplet estimation step and instead use dense keypoint measurements and correspondences from an autonomous keypoint detection and matching method based on deep learning. Moreover, we develop a factor graph-based approach allowing for simultaneous optimization of the spacecraft's pose, landmark positions, Sun-relative direction, and surface normals and albedos via fusion of Sun vector measurements and image keypoint measurements. The proposed framework is validated on real imagery taken by the Dawn mission to the asteroid 4 Vesta and the minor planet 1 Ceres and compared against an SPC reconstruction, where we demonstrate superior rendering performance compared to an SPC solution and precise alignment to a stereophotogrammetry (SPG) solution without relying on any a priori camera pose and topography information or humans-in-the-loop.
Keypoint-based Stereophotoclinometry for Characterizing and Navigating Small Bodies: A Factor Graph Approach
Dec 11, 2023


This paper proposes the incorporation of techniques from stereophotoclinometry (SPC) into a keypoint-based structure-from-motion (SfM) system to estimate the surface normal and albedo at detected landmarks to improve autonomous surface and shape characterization of small celestial bodies from in-situ imagery. In contrast to the current state-of-the-practice method for small body shape reconstruction, i.e., SPC, which relies on human-in-the-loop verification and high-fidelity a priori information to achieve accurate results, we forego the expensive maplet estimation step and instead leverage dense keypoint measurements and correspondences from an autonomous keypoint detection and matching method based on deep learning to provide the necessary photogrammetric constraints. Moreover, we develop a factor graph-based approach allowing for simultaneous optimization of the spacecraft's pose, landmark positions, Sun-relative direction, and surface normals and albedos via fusion of Sun sensor measurements and image keypoint measurements. The proposed framework is validated on real imagery of the Cornelia crater on Asteroid 4 Vesta, along with pose estimation and mapping comparison against an SPC reconstruction, where we demonstrate precise alignment to the SPC solution without relying on any a priori camera pose and topography information or humans-in-the-loop
Distributed Global Structure-from-Motion with a Deep Front-End
Nov 30, 2023While initial approaches to Structure-from-Motion (SfM) revolved around both global and incremental methods, most recent applications rely on incremental systems to estimate camera poses due to their superior robustness. Though there has been tremendous progress in SfM `front-ends' powered by deep models learned from data, the state-of-the-art (incremental) SfM pipelines still rely on classical SIFT features, developed in 2004. In this work, we investigate whether leveraging the developments in feature extraction and matching helps global SfM perform on par with the SOTA incremental SfM approach (COLMAP). To do so, we design a modular SfM framework that allows us to easily combine developments in different stages of the SfM pipeline. Our experiments show that while developments in deep-learning based two-view correspondence estimation do translate to improvements in point density for scenes reconstructed with global SfM, none of them outperform SIFT when comparing with incremental SfM results on a range of datasets. Our SfM system is designed from the ground up to leverage distributed computation, enabling us to parallelize computation on multiple machines and scale to large scenes.
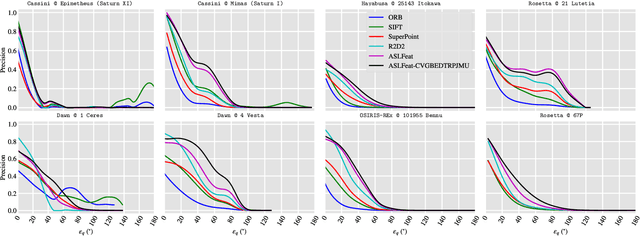
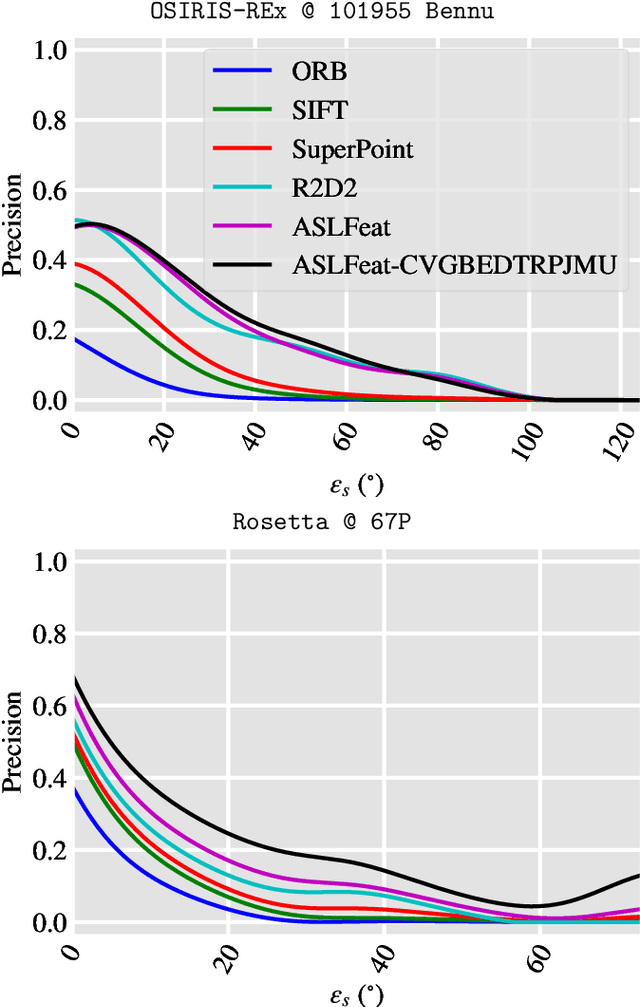
Efficient Feature Description for Small Body Relative Navigation using Binary Convolutional Neural Networks
Apr 11, 2023Missions to small celestial bodies rely heavily on optical feature tracking for characterization of and relative navigation around the target body. While techniques for feature tracking based on deep learning are a promising alternative to current human-in-the-loop processes, designing deep architectures that can operate onboard spacecraft is challenging due to onboard computational and memory constraints. This paper introduces a novel deep local feature description architecture that leverages binary convolutional neural network layers to significantly reduce computational and memory requirements. We train and test our models on real images of small bodies from legacy and ongoing missions and demonstrate increased performance relative to traditional handcrafted methods. Moreover, we implement our models onboard a surrogate for the next-generation spacecraft processor and demonstrate feasible runtimes for online feature tracking.
Deep Monocular Hazard Detection for Safe Small Body Landing
Jan 30, 2023Hazard detection and avoidance is a key technology for future robotic small body sample return and lander missions. Current state-of-the-practice methods rely on high-fidelity, a priori terrain maps, which require extensive human-in-the-loop verification and expensive reconnaissance campaigns to resolve mapping uncertainties. We propose a novel safety mapping paradigm that leverages deep semantic segmentation techniques to predict landing safety directly from a single monocular image, thus reducing reliance on high-fidelity, a priori data products. We demonstrate precise and accurate safety mapping performance on real in-situ imagery of prospective sample sites from the OSIRIS-REx mission.
AstroSLAM: Autonomous Monocular Navigation in the Vicinity of a Celestial Small Body -- Theory and Experiments
Dec 01, 2022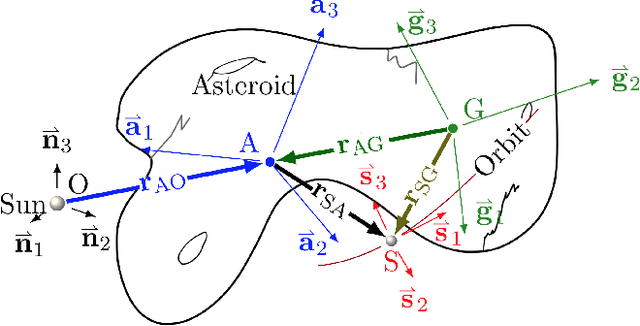



We propose AstroSLAM, a standalone vision-based solution for autonomous online navigation around an unknown target small celestial body. AstroSLAM is predicated on the formulation of the SLAM problem as an incrementally growing factor graph, facilitated by the use of the GTSAM library and the iSAM2 engine. By combining sensor fusion with orbital motion priors, we achieve improved performance over a baseline SLAM solution. We incorporate orbital motion constraints into the factor graph by devising a novel relative dynamics factor, which links the relative pose of the spacecraft to the problem of predicting trajectories stemming from the motion of the spacecraft in the vicinity of the small body. We demonstrate the excellent performance of AstroSLAM using both real legacy mission imagery and trajectory data courtesy of NASA's Planetary Data System, as well as real in-lab imagery data generated on a 3 degree-of-freedom spacecraft simulator test-bed.
AstroVision: Towards Autonomous Feature Detection and Description for Missions to Small Bodies Using Deep Learning
Aug 03, 2022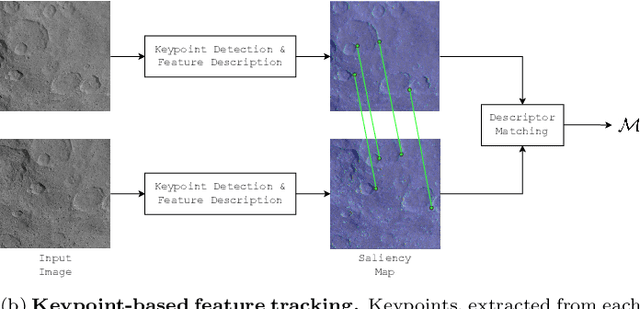
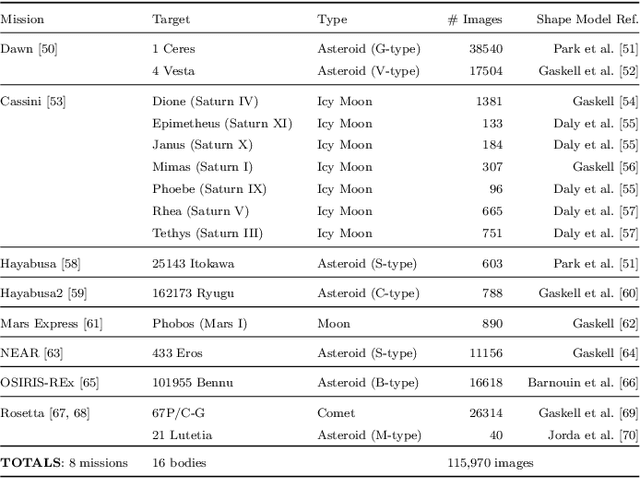
Missions to small celestial bodies rely heavily on optical feature tracking for characterization of and relative navigation around the target body. While deep learning has led to great advancements in feature detection and description, training and validating data-driven models for space applications is challenging due to the limited availability of large-scale, annotated datasets. This paper introduces AstroVision, a large-scale dataset comprised of 115,970 densely annotated, real images of 16 different small bodies captured during past and ongoing missions. We leverage AstroVision to develop a set of standardized benchmarks and conduct an exhaustive evaluation of both handcrafted and data-driven feature detection and description methods. Next, we employ AstroVision for end-to-end training of a state-of-the-art, deep feature detection and description network and demonstrate improved performance on multiple benchmarks. The full benchmarking pipeline and the dataset will be made publicly available to facilitate the advancement of computer vision algorithms for space applications.