 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTURTLMap: Real-time Localization and Dense Mapping of Low-texture Underwater Environments with a Low-cost Unmanned Underwater Vehicle
Aug 02, 2024Significant work has been done on advancing localization and mapping in underwater environments. Still, state-of-the-art methods are challenged by low-texture environments, which is common for underwater settings. This makes it difficult to use existing methods in diverse, real-world scenes. In this paper, we present TURTLMap, a novel solution that focuses on textureless underwater environments through a real-time localization and mapping method. We show that this method is low-cost, and capable of tracking the robot accurately, while constructing a dense map of a low-textured environment in real-time. We evaluate the proposed method using real-world data collected in an indoor water tank with a motion capture system and ground truth reference map. Qualitative and quantitative results validate the proposed system achieves accurate and robust localization and precise dense mapping, even when subject to wave conditions. The project page for TURTLMap is https://umfieldrobotics.github.io/TURTLMap.
AstroVision: Towards Autonomous Feature Detection and Description for Missions to Small Bodies Using Deep Learning
Aug 03, 2022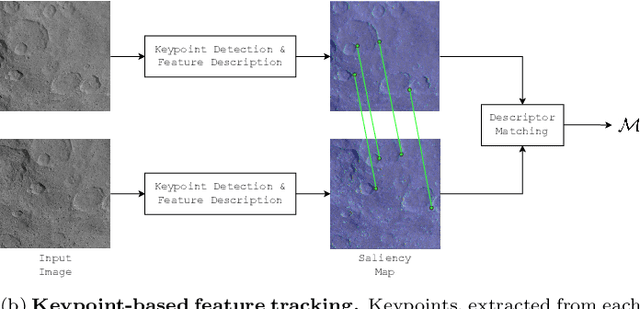
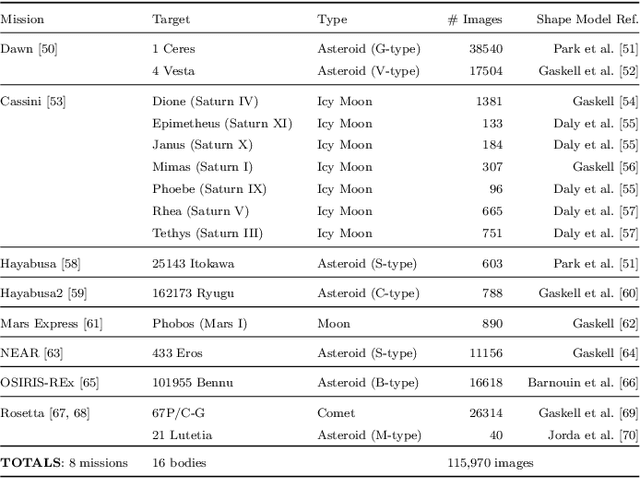
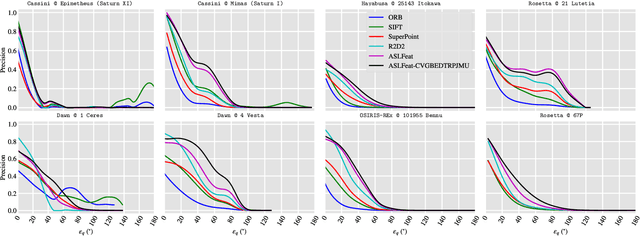
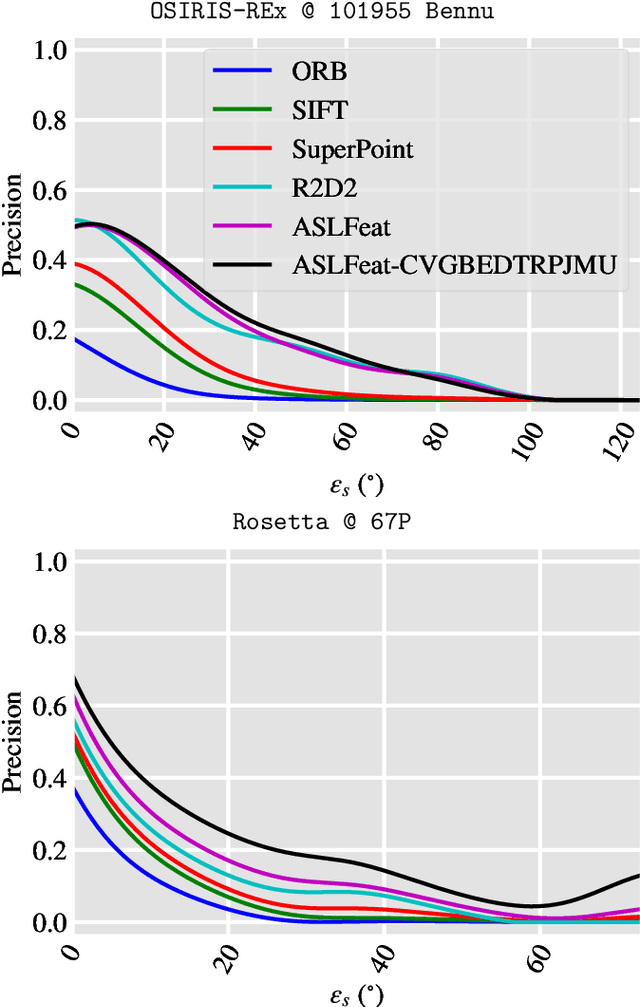
Missions to small celestial bodies rely heavily on optical feature tracking for characterization of and relative navigation around the target body. While deep learning has led to great advancements in feature detection and description, training and validating data-driven models for space applications is challenging due to the limited availability of large-scale, annotated datasets. This paper introduces AstroVision, a large-scale dataset comprised of 115,970 densely annotated, real images of 16 different small bodies captured during past and ongoing missions. We leverage AstroVision to develop a set of standardized benchmarks and conduct an exhaustive evaluation of both handcrafted and data-driven feature detection and description methods. Next, we employ AstroVision for end-to-end training of a state-of-the-art, deep feature detection and description network and demonstrate improved performance on multiple benchmarks. The full benchmarking pipeline and the dataset will be made publicly available to facilitate the advancement of computer vision algorithms for space applications.