 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAstroSplat: Physics-Based Gaussian Splatting for Rendering and Reconstruction of Small Celestial Bodies
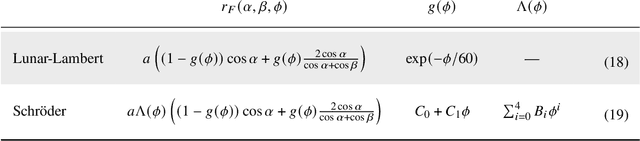
Mar 12, 2026Image-based surface reconstruction and characterization are crucial for missions to small celestial bodies (e.g., asteroids), as it informs mission planning, navigation, and scientific analysis. Recent advances in Gaussian splatting enable high-fidelity neural scene representations but typically rely on a spherical harmonic intensity parameterization that is strictly appearance-based and does not explicitly model material properties or light-surface interactions. We introduce AstroSplat, a physics-based Gaussian splatting framework that integrates planetary reflectance models to improve the autonomous reconstruction and photometric characterization of small-body surfaces from in-situ imagery. The proposed framework is validated on real imagery taken by NASA's Dawn mission, where we demonstrate superior rendering performance and surface reconstruction accuracy compared to the typical spherical harmonic parameterization.
Stereophotoclinometry Revisited
Apr 11, 2025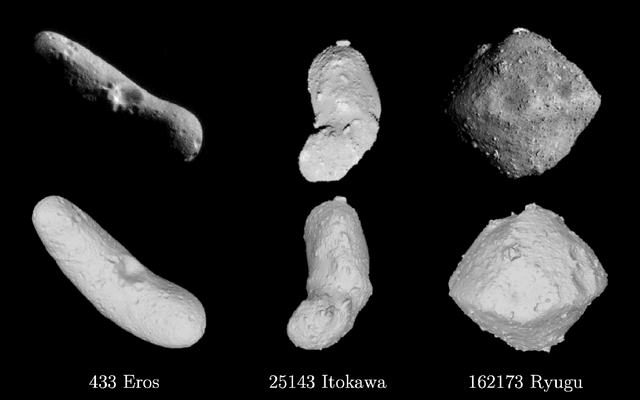
Image-based surface reconstruction and characterization is crucial for missions to small celestial bodies, as it informs mission planning, navigation, and scientific analysis. However, current state-of-the-practice methods, such as stereophotoclinometry (SPC), rely heavily on human-in-the-loop verification and high-fidelity a priori information. This paper proposes Photoclinometry-from-Motion (PhoMo), a novel framework that incorporates photoclinometry techniques into a keypoint-based structure-from-motion (SfM) system to estimate the surface normal and albedo at detected landmarks to improve autonomous surface and shape characterization of small celestial bodies from in-situ imagery. In contrast to SPC, we forego the expensive maplet estimation step and instead use dense keypoint measurements and correspondences from an autonomous keypoint detection and matching method based on deep learning. Moreover, we develop a factor graph-based approach allowing for simultaneous optimization of the spacecraft's pose, landmark positions, Sun-relative direction, and surface normals and albedos via fusion of Sun vector measurements and image keypoint measurements. The proposed framework is validated on real imagery taken by the Dawn mission to the asteroid 4 Vesta and the minor planet 1 Ceres and compared against an SPC reconstruction, where we demonstrate superior rendering performance compared to an SPC solution and precise alignment to a stereophotogrammetry (SPG) solution without relying on any a priori camera pose and topography information or humans-in-the-loop.
Crater Projection in Linear Pushbroom Camera Images
Sep 30, 2024Scientific imaging of the Moon, Mars, and other celestial bodies is often accomplished with pushbroom cameras. Craters with elliptical rims are common objects of interest within the images produced by such sensors. This work provides a framework to analyze the appearance of crater rims in pushbroom images. With knowledge of only common ellipse parameters describing the crater rim, explicit formulations are developed and shown to be convenient for drawing the apparent crater in pushbroom images. Implicit forms are also developed and indicate the orbital conditions under which craters form conics in images. Several numerical examples are provided which demonstrate how different forms of crater rim projections can be interpreted and used in practice.
LONEStar: The Lunar Flashlight Optical Navigation Experiment
Jan 22, 2024This paper documents the results from the highly successful Lunar flashlight Optical Navigation Experiment with a Star tracker (LONEStar). Launched in December 2022, Lunar Flashlight (LF) was a NASA-funded technology demonstration mission. After a propulsion system anomaly prevented capture in lunar orbit, LF was ejected from the Earth-Moon system and into heliocentric space. NASA subsequently transferred ownership of LF to Georgia Tech to conduct an unfunded extended mission to demonstrate further advanced technology objectives, including LONEStar. From August-December 2023, the LONEStar team performed on-orbit calibration of the optical instrument and a number of different OPNAV experiments. This campaign included the processing of nearly 400 images of star fields, Earth and Moon, and four other planets (Mercury, Mars, Jupiter, and Saturn). LONEStar provided the first on-orbit demonstrations of heliocentric navigation using only optical observations of planets. Of special note is the successful in-flight demonstration of (1) instantaneous triangulation with simultaneous sightings of two planets with the LOST algorithm and (2) dynamic triangulation with sequential sightings of multiple planets.
Keypoint-based Stereophotoclinometry for Characterizing and Navigating Small Bodies: A Factor Graph Approach
Dec 11, 2023


This paper proposes the incorporation of techniques from stereophotoclinometry (SPC) into a keypoint-based structure-from-motion (SfM) system to estimate the surface normal and albedo at detected landmarks to improve autonomous surface and shape characterization of small celestial bodies from in-situ imagery. In contrast to the current state-of-the-practice method for small body shape reconstruction, i.e., SPC, which relies on human-in-the-loop verification and high-fidelity a priori information to achieve accurate results, we forego the expensive maplet estimation step and instead leverage dense keypoint measurements and correspondences from an autonomous keypoint detection and matching method based on deep learning to provide the necessary photogrammetric constraints. Moreover, we develop a factor graph-based approach allowing for simultaneous optimization of the spacecraft's pose, landmark positions, Sun-relative direction, and surface normals and albedos via fusion of Sun sensor measurements and image keypoint measurements. The proposed framework is validated on real imagery of the Cornelia crater on Asteroid 4 Vesta, along with pose estimation and mapping comparison against an SPC reconstruction, where we demonstrate precise alignment to the SPC solution without relying on any a priori camera pose and topography information or humans-in-the-loop