 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStereophotoclinometry Revisited
Apr 11, 2025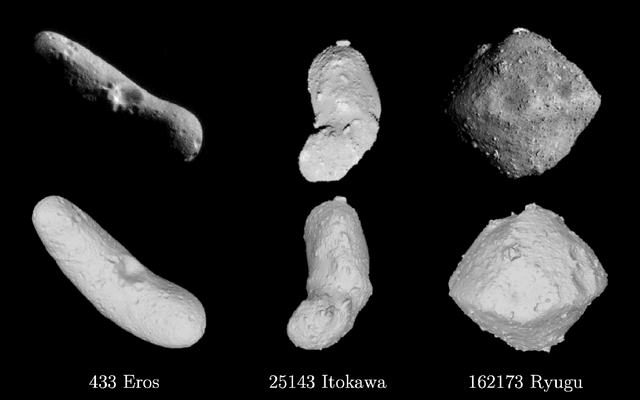
Image-based surface reconstruction and characterization is crucial for missions to small celestial bodies, as it informs mission planning, navigation, and scientific analysis. However, current state-of-the-practice methods, such as stereophotoclinometry (SPC), rely heavily on human-in-the-loop verification and high-fidelity a priori information. This paper proposes Photoclinometry-from-Motion (PhoMo), a novel framework that incorporates photoclinometry techniques into a keypoint-based structure-from-motion (SfM) system to estimate the surface normal and albedo at detected landmarks to improve autonomous surface and shape characterization of small celestial bodies from in-situ imagery. In contrast to SPC, we forego the expensive maplet estimation step and instead use dense keypoint measurements and correspondences from an autonomous keypoint detection and matching method based on deep learning. Moreover, we develop a factor graph-based approach allowing for simultaneous optimization of the spacecraft's pose, landmark positions, Sun-relative direction, and surface normals and albedos via fusion of Sun vector measurements and image keypoint measurements. The proposed framework is validated on real imagery taken by the Dawn mission to the asteroid 4 Vesta and the minor planet 1 Ceres and compared against an SPC reconstruction, where we demonstrate superior rendering performance compared to an SPC solution and precise alignment to a stereophotogrammetry (SPG) solution without relying on any a priori camera pose and topography information or humans-in-the-loop.
Icy Moon Surface Simulation and Stereo Depth Estimation for Sampling Autonomy
Jan 23, 2024Sampling autonomy for icy moon lander missions requires understanding of topographic and photometric properties of the sampling terrain. Unavailability of high resolution visual datasets (either bird-eye view or point-of-view from a lander) is an obstacle for selection, verification or development of perception systems. We attempt to alleviate this problem by: 1) proposing Graphical Utility for Icy moon Surface Simulations (GUISS) framework, for versatile stereo dataset generation that spans the spectrum of bulk photometric properties, and 2) focusing on a stereo-based visual perception system and evaluating both traditional and deep learning-based algorithms for depth estimation from stereo matching. The surface reflectance properties of icy moon terrains (Enceladus and Europa) are inferred from multispectral datasets of previous missions. With procedural terrain generation and physically valid illumination sources, our framework can fit a wide range of hypotheses with respect to visual representations of icy moon terrains. This is followed by a study over the performance of stereo matching algorithms under different visual hypotheses. Finally, we emphasize the standing challenges to be addressed for simulating perception data assets for icy moons such as Enceladus and Europa. Our code can be found here: https://github.com/nasa-jpl/guiss.
Keypoint-based Stereophotoclinometry for Characterizing and Navigating Small Bodies: A Factor Graph Approach
Dec 11, 2023


This paper proposes the incorporation of techniques from stereophotoclinometry (SPC) into a keypoint-based structure-from-motion (SfM) system to estimate the surface normal and albedo at detected landmarks to improve autonomous surface and shape characterization of small celestial bodies from in-situ imagery. In contrast to the current state-of-the-practice method for small body shape reconstruction, i.e., SPC, which relies on human-in-the-loop verification and high-fidelity a priori information to achieve accurate results, we forego the expensive maplet estimation step and instead leverage dense keypoint measurements and correspondences from an autonomous keypoint detection and matching method based on deep learning to provide the necessary photogrammetric constraints. Moreover, we develop a factor graph-based approach allowing for simultaneous optimization of the spacecraft's pose, landmark positions, Sun-relative direction, and surface normals and albedos via fusion of Sun sensor measurements and image keypoint measurements. The proposed framework is validated on real imagery of the Cornelia crater on Asteroid 4 Vesta, along with pose estimation and mapping comparison against an SPC reconstruction, where we demonstrate precise alignment to the SPC solution without relying on any a priori camera pose and topography information or humans-in-the-loop