 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIcy Moon Surface Simulation and Stereo Depth Estimation for Sampling Autonomy
Jan 23, 2024Sampling autonomy for icy moon lander missions requires understanding of topographic and photometric properties of the sampling terrain. Unavailability of high resolution visual datasets (either bird-eye view or point-of-view from a lander) is an obstacle for selection, verification or development of perception systems. We attempt to alleviate this problem by: 1) proposing Graphical Utility for Icy moon Surface Simulations (GUISS) framework, for versatile stereo dataset generation that spans the spectrum of bulk photometric properties, and 2) focusing on a stereo-based visual perception system and evaluating both traditional and deep learning-based algorithms for depth estimation from stereo matching. The surface reflectance properties of icy moon terrains (Enceladus and Europa) are inferred from multispectral datasets of previous missions. With procedural terrain generation and physically valid illumination sources, our framework can fit a wide range of hypotheses with respect to visual representations of icy moon terrains. This is followed by a study over the performance of stereo matching algorithms under different visual hypotheses. Finally, we emphasize the standing challenges to be addressed for simulating perception data assets for icy moons such as Enceladus and Europa. Our code can be found here: https://github.com/nasa-jpl/guiss.
Granular Gym: High Performance Simulation for Robotic Tasks with Granular Materials
Jun 02, 2023Granular materials are of critical interest to many robotic tasks in planetary science, construction, and manufacturing. However, the dynamics of granular materials are complex and often computationally very expensive to simulate. We propose a set of methodologies and a system for the fast simulation of granular materials on Graphics Processing Units (GPUs), and show that this simulation is fast enough for basic training with Reinforcement Learning algorithms, which currently require many dynamics samples to achieve acceptable performance. Our method models granular material dynamics using implicit timestepping methods for multibody rigid contacts, as well as algorithmic techniques for efficient parallel collision detection between pairs of particles and between particle and arbitrarily shaped rigid bodies, and programming techniques for minimizing warp divergence on Single-Instruction, Multiple-Thread (SIMT) chip architectures. We showcase our simulation system on several environments targeted toward robotic tasks, and release our simulator as an open-source tool.
Deterministic Iteratively Built KD-Tree with KNN Search for Exact Applications
Jun 07, 2021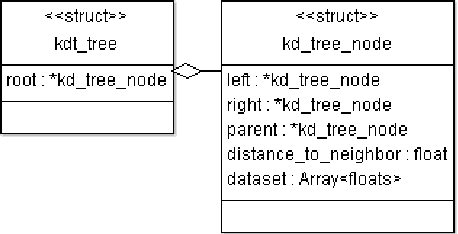
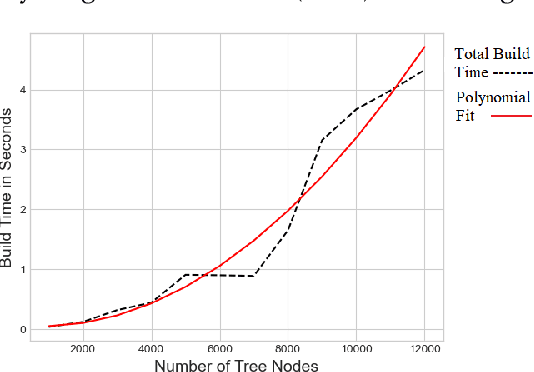
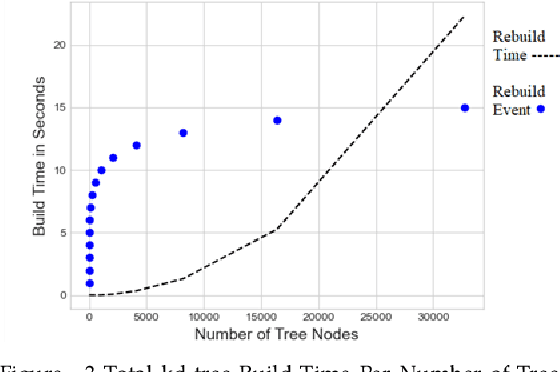
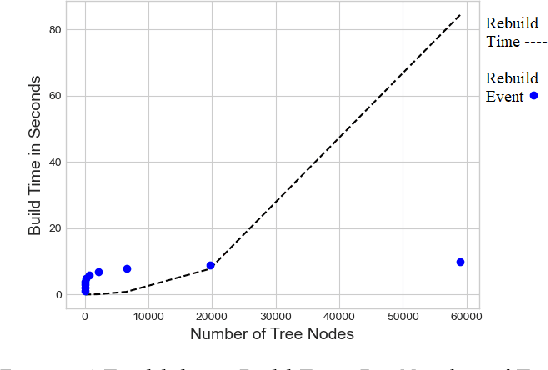
K-Nearest Neighbors (KNN) search is a fundamental algorithm in artificial intelligence software with applications in robotics, and autonomous vehicles. These wide-ranging applications utilize KNN either directly for simple classification or combine KNN results as input to other algorithms such as Locally Weighted Learning (LWL). Similar to binary trees, kd-trees become unbalanced as new data is added in online applications which can lead to rapid degradation in search performance unless the tree is rebuilt. Although approximate methods are suitable for graphics applications, which prioritize query speed over query accuracy, they are unsuitable for certain applications in autonomous systems, aeronautics, and robotic manipulation where exact solutions are desired. In this paper, we will attempt to assess the performance of non-recursive deterministic kd-tree functions and KNN functions. We will also present a "forest of interval kd-trees" which reduces the number of tree rebuilds, without compromising the exactness of query results.