 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFederated Distributional Reinforcement Learning with Distributional Critic Regularization
Mar 18, 2026Federated reinforcement learning typically aggregates value functions or policies by parameter averaging, which emphasizes expected return and can obscure statistical multimodality and tail behavior that matter in safety-critical settings. We formalize federated distributional reinforcement learning (FedDistRL), where clients parametrize quantile value function critics and federate these networks only. We also propose TR-FedDistRL, which builds a per client, risk-aware Wasserstein barycenter over a temporal buffer. This local barycenter provides a reference region to constrain the parameter averaged critic, ensuring necessary distributional information is not averaged out during the federation process. The distributional trust region is implemented as a shrink-squash step around this reference. Under fixed-policy evaluation, the feasibility map is nonexpansive and the update is contractive in a probe-set Wasserstein metric under evaluation. Experiments on a bandit, multi-agent gridworld, and continuous highway environment show reduced mean-smearing, improved safety proxies (catastrophe/accident rate), and lower critic/policy drift versus mean-oriented and non-federated baselines.
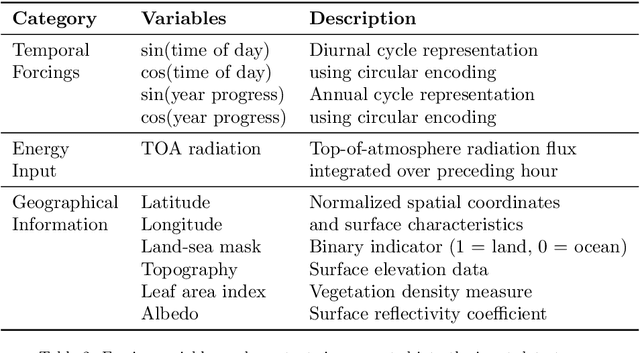
Learning to Advect: A Neural Semi-Lagrangian Architecture for Weather Forecasting
Jan 29, 2026Recent machine-learning approaches to weather forecasting often employ a monolithic architecture, where distinct physical mechanisms (advection, transport), diffusion-like mixing, thermodynamic processes, and forcing are represented implicitly within a single large network. This representation is particularly problematic for advection, where long-range transport must be treated with expensive global interaction mechanisms or through deep, stacked convolutional layers. To mitigate this, we present PARADIS, a physics-inspired global weather prediction model that imposes inductive biases on network behavior through a functional decomposition into advection, diffusion, and reaction blocks acting on latent variables. We implement advection through a Neural Semi-Lagrangian operator that performs trajectory-based transport via differentiable interpolation on the sphere, enabling end-to-end learning of both the latent modes to be transported and their characteristic trajectories. Diffusion-like processes are modeled through depthwise-separable spatial mixing, while local source terms and vertical interactions are modeled via pointwise channel interactions, enabling operator-level physical structure. PARADIS provides state-of-the-art forecast skill at a fraction of the training cost. On ERA5-based benchmarks, the 1 degree PARADIS model, with a total training cost of less than a GPU month, meets or exceeds the performance of 0.25 degree traditional and machine-learning baselines, including the ECMWF HRES forecast and DeepMind's GraphCast.
Can Optimal Transport Improve Federated Inverse Reinforcement Learning?
Jan 01, 2026In robotics and multi-agent systems, fleets of autonomous agents often operate in subtly different environments while pursuing a common high-level objective. Directly pooling their data to learn a shared reward function is typically impractical due to differences in dynamics, privacy constraints, and limited communication bandwidth. This paper introduces an optimal transport-based approach to federated inverse reinforcement learning (IRL). Each client first performs lightweight Maximum Entropy IRL locally, adhering to its computational and privacy limitations. The resulting reward functions are then fused via a Wasserstein barycenter, which considers their underlying geometric structure. We further prove that this barycentric fusion yields a more faithful global reward estimate than conventional parameter averaging methods in federated learning. Overall, this work provides a principled and communication-efficient framework for deriving a shared reward that generalizes across heterogeneous agents and environments.
Split Conformal Prediction in the Function Space with Neural Operators
Sep 04, 2025Uncertainty quantification for neural operators remains an open problem in the infinite-dimensional setting due to the lack of finite-sample coverage guarantees over functional outputs. While conformal prediction offers finite-sample guarantees in finite-dimensional spaces, it does not directly extend to function-valued outputs. Existing approaches (Gaussian processes, Bayesian neural networks, and quantile-based operators) require strong distributional assumptions or yield conservative coverage. This work extends split conformal prediction to function spaces following a two step method. We first establish finite-sample coverage guarantees in a finite-dimensional space using a discretization map in the output function space. Then these guarantees are lifted to the function-space by considering the asymptotic convergence as the discretization is refined. To characterize the effect of resolution, we decompose the conformal radius into discretization, calibration, and misspecification components. This decomposition motivates a regression-based correction to transfer calibration across resolutions. Additionally, we propose two diagnostic metrics (conformal ensemble score and internal agreement) to quantify forecast degradation in autoregressive settings. Empirical results show that our method maintains calibrated coverage with less variation under resolution shifts and achieves better coverage in super-resolution tasks.
DEF: Diffusion-augmented Ensemble Forecasting
Jun 08, 2025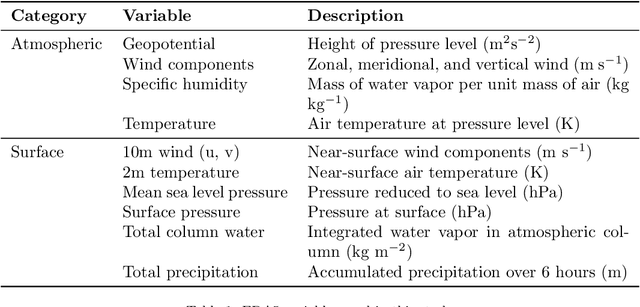


We present DEF (\textbf{\ul{D}}iffusion-augmented \textbf{\ul{E}}nsemble \textbf{\ul{F}}orecasting), a novel approach for generating initial condition perturbations. Modern approaches to initial condition perturbations are primarily designed for numerical weather prediction (NWP) solvers, limiting their applicability in the rapidly growing field of machine learning for weather prediction. Consequently, stochastic models in this domain are often developed on a case-by-case basis. We demonstrate that a simple conditional diffusion model can (1) generate meaningful structured perturbations, (2) be applied iteratively, and (3) utilize a guidance term to intuitivey control the level of perturbation. This method enables the transformation of any deterministic neural forecasting system into a stochastic one. With our stochastic extended systems, we show that the model accumulates less error over long-term forecasts while producing meaningful forecast distributions. We validate our approach on the 5.625$^\circ$ ERA5 reanalysis dataset, which comprises atmospheric and surface variables over a discretized global grid, spanning from the 1960s to the present. On this dataset, our method demonstrates improved predictive performance along with reasonable spread estimates.
PEARL: Preconditioner Enhancement through Actor-critic Reinforcement Learning
Jan 18, 2025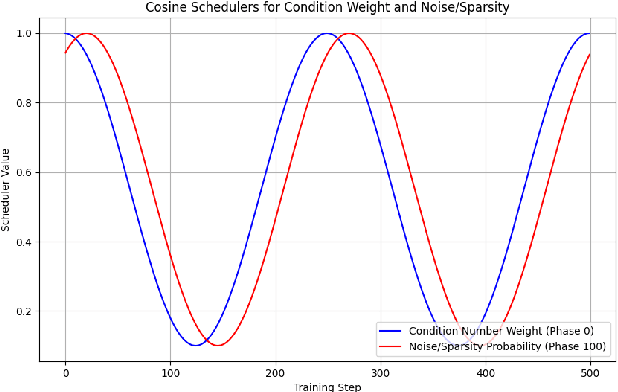

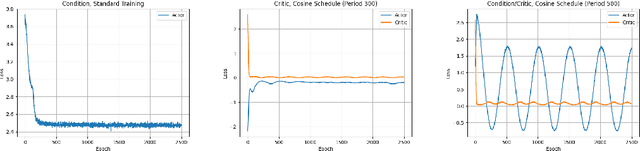
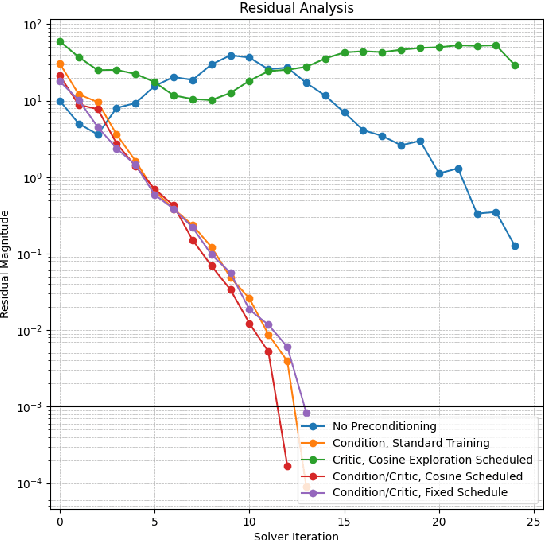
We present PEARL (Preconditioner Enhancement through Actor-critic Reinforcement Learning), a novel approach to learning matrix preconditioners. Existing preconditioners such as Jacobi, Incomplete LU, and Algebraic Multigrid methods offer problem-specific advantages but rely heavily on hyperparameter tuning. Recent advances have explored using deep neural networks to learn preconditioners, though challenges such as misbehaved objective functions and costly training procedures remain. PEARL introduces a reinforcement learning approach for learning preconditioners, specifically, a contextual bandit formulation. The framework utilizes an actor-critic model, where the actor generates the incomplete Cholesky decomposition of preconditioners, and the critic evaluates them based on reward-specific feedback. To further guide the training, we design a dual-objective function, combining updates from the critic and condition number. PEARL contributes a generalizable preconditioner learning method, dynamic sparsity exploration, and cosine schedulers for improved stability and exploratory power. We compare our approach to traditional and neural preconditioners, demonstrating improved flexibility and iterative solving speed.
Deep Learning for Koopman Operator Estimation in Idealized Atmospheric Dynamics
Sep 10, 2024Deep learning is revolutionizing weather forecasting, with new data-driven models achieving accuracy on par with operational physical models for medium-term predictions. However, these models often lack interpretability, making their underlying dynamics difficult to understand and explain. This paper proposes methodologies to estimate the Koopman operator, providing a linear representation of complex nonlinear dynamics to enhance the transparency of data-driven models. Despite its potential, applying the Koopman operator to large-scale problems, such as atmospheric modeling, remains challenging. This study aims to identify the limitations of existing methods, refine these models to overcome various bottlenecks, and introduce novel convolutional neural network architectures that capture simplified dynamics.
CppFlow: Generative Inverse Kinematics for Efficient and Robust Cartesian Path Planning
Sep 16, 2023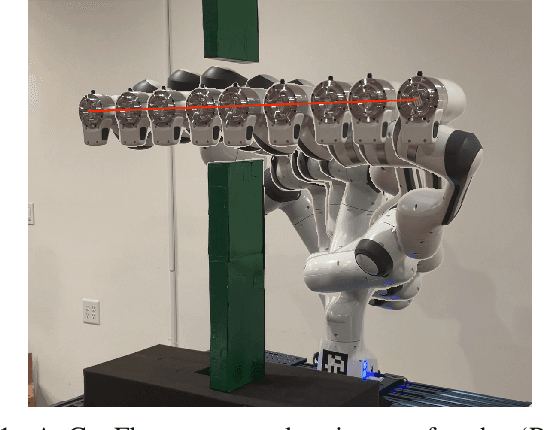
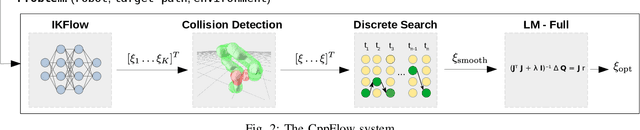
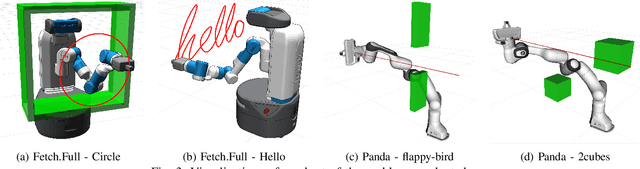
In this work we present CppFlow - a novel and performant planner for the Cartesian Path Planning problem, which finds valid trajectories up to 129x faster than current methods, while also succeeding on more difficult problems where others fail. At the core of the proposed algorithm is the use of a learned, generative Inverse Kinematics solver, which is able to efficiently produce promising entire candidate solution trajectories on the GPU. Precise, valid solutions are then found through classical approaches such as differentiable programming, global search, and optimization. In combining approaches from these two paradigms we get the best of both worlds - efficient approximate solutions from generative AI which are made exact using the guarantees of traditional planning and optimization. We evaluate our system against other state of the art methods on a set of established baselines as well as new ones introduced in this work and find that our method significantly outperforms others in terms of the time to find a valid solution and planning success rate, and performs comparably in terms of trajectory length over time. The work is made open source and available for use upon acceptance.
Granular Gym: High Performance Simulation for Robotic Tasks with Granular Materials
Jun 02, 2023Granular materials are of critical interest to many robotic tasks in planetary science, construction, and manufacturing. However, the dynamics of granular materials are complex and often computationally very expensive to simulate. We propose a set of methodologies and a system for the fast simulation of granular materials on Graphics Processing Units (GPUs), and show that this simulation is fast enough for basic training with Reinforcement Learning algorithms, which currently require many dynamics samples to achieve acceptable performance. Our method models granular material dynamics using implicit timestepping methods for multibody rigid contacts, as well as algorithmic techniques for efficient parallel collision detection between pairs of particles and between particle and arbitrarily shaped rigid bodies, and programming techniques for minimizing warp divergence on Single-Instruction, Multiple-Thread (SIMT) chip architectures. We showcase our simulation system on several environments targeted toward robotic tasks, and release our simulator as an open-source tool.
Probabilistic Inference of Simulation Parameters via Parallel Differentiable Simulation
Sep 18, 2021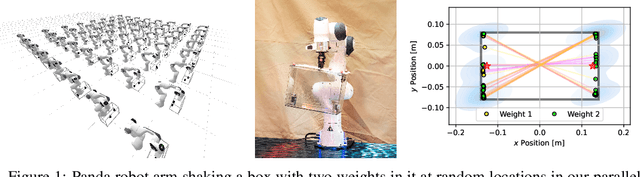

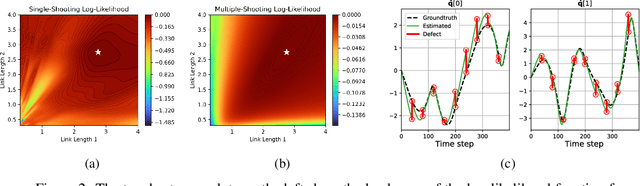
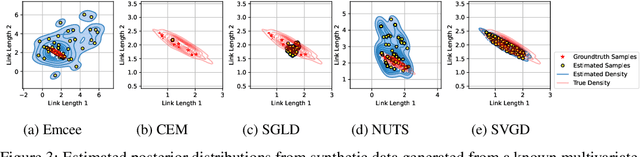
To accurately reproduce measurements from the real world, simulators need to have an adequate model of the physical system and require the parameters of the model be identified. We address the latter problem of estimating parameters through a Bayesian inference approach that approximates a posterior distribution over simulation parameters given real sensor measurements. By extending the commonly used Gaussian likelihood model for trajectories via the multiple-shooting formulation, our chosen particle-based inference algorithm Stein Variational Gradient Descent is able to identify highly nonlinear, underactuated systems. We leverage GPU code generation and differentiable simulation to evaluate the likelihood and its gradient for many particles in parallel. Our algorithm infers non-parametric distributions over simulation parameters more accurately than comparable baselines and handles constraints over parameters efficiently through gradient-based optimization. We evaluate estimation performance on several physical experiments. On an underactuated mechanism where a 7-DOF robot arm excites an object with an unknown mass configuration, we demonstrate how our inference technique can identify symmetries between the parameters and provide highly accurate predictions. Project website: https://uscresl.github.io/prob-diff-sim